











 Extract (6-MSITC) in Healthy Older Adults")
: An In-Depth Exploration into its Thermogenic Role and Social Significance")



Just when it seemed like robots couldn’t get any cooler, Cornell researchers have created a soft robot muscle that can regulate its temperature through sweating.
This form of thermal management is a basic building block for enabling untethered, high-powered robots to operate for long periods of time without overheating, according to the Rob Shepherd, associate professor of mechanical and aerospace engineering, who led the project.
The team’s paper, “Autonomic Perspiration in 3-D Printed Hydrogel Actuators,” published Jan. 29 in Science Robotics.
One of the hurdles for making enduring, adaptable and agile robots is managing the robots’ internal temperature, according to Shepherd, the paper’s senior author.
If the high-torque density motors and exothermic engines that power a robot overheat, the robot will cease to operate.
This is a particular issue for soft robots, which are made of synthetic materials. While more flexible, they hold their heat, unlike metals, which dissipate heat quickly.
An internal cooling technology, such as a fan, may not be much help because it would take up space inside the robot and add weight.
So Shepherd’s team took inspiration from the natural cooling system that exists in mammals: sweating.
Video of the sweaty robotic hand gripping and lowering the temperature of different hot objects. Credit: Mishra et al., Sci Robot. 5, eaaz3918 (2020)
“The ability to perspire is one of the most remarkable features of humans,” said co-lead author T.J. Wallin, M.S. ’16, Ph.D. ’18, a research scientist at Facebook Reality Labs.
“Sweating takes advantage of evaporated water loss to rapidly dissipate heat and can cool below the ambient environmental temperature. … So as is often the case, biology provided an excellent guide for us as engineers.”
Shepherd’s team partnered with the lab of Emmanuel Giannelis, the Walter R. Read Professor of Engineering, to create the necessary nanopolymer materials for sweating via a 3-D-printing technique called multi-material stereolithography, which uses light to cure resin into predesigned shapes.
“Our contribution is the making of mixtures of nanoparticles and polymeric materials that basically allow us to control the viscosity, or flow, of these fluids,” said Giannelis, also Cornell’s vice provost for research and vice president for technology transfer, intellectual property and research policy.
The researchers fabricated fingerlike actuators composed of two hydrogel materials that can retain water and respond to temperature – in effect, “smart” sponges.
The base layer, made of poly-N-isopropylacrylamide, reacts to temperatures above 30 C (86 F) by shrinking, which squeezes water up into a top layer of polyacrylamide that is perforated with micron-sized pores.
These pores are sensitive to the same temperature range and automatically dilate to release the “sweat,” then close when the temperature drops below 30 C.
Video of the soft actuators sweating. Credit: Mishra et al., Sci Robot. 5, eaaz3918 (2020)
The evaporation of this water reduces the actuator’s surface temperature by 21 C within 30 seconds, a cooling process that is approximately three times more efficient than in humans, the researchers found. The actuators are able to cool off roughly six times faster when exposed to wind from a fan.
“The best part of this synthetic strategy is that the thermal regulatory performance is based in the material itself,” said Wallin. “We did not need to have sensors or other components to control the sweating rate. When the local temperature rose above the transition, the pores would simply open and close on their own.”
Video of the 3D printing technique multimaterial stereolithography. Credit: Mishra et al., Sci Robot. 5, eaaz3918 (2020)
The team incorporated the actuator fingers into a robot hand that could grab and lift objects, and they realized that autonomous sweating not only cooled the hand, but lowered the temperature of the object as well.
While the lubrication could make a robot hand slippery, Shepherd says that modifications to the hydrogel texture could compensate by improving the hand’s grip, much like wrinkles in skin.
One disadvantage of the technology is that it can hinder a robot’s mobility. There is also a need for the robots to replenish their water supply, which has led Shepherd to envision soft robots that will someday not only perspire like mammals, but drink like them, too.

The ability of a robot to secrete fluids could also lead to methods for absorbing nutrients, catalyzing reactions, removing contaminants and coating the robot’s surface with a protective layer, the researchers wrote.
“I think that the future of making these more biologically analogous materials and robots is going to rely on the material composition,” Shepherd said.
“This brings up a point [about the importance of] multidisciplinary research in this area, where really no one group has all the answers.”
Other contributors included postdoctoral associate and co-lead author Anand Mishra; postdoctoral associate Wenyang Pan; doctoral student Patricia Xu; and Barbara Mazzolai of the Italian Institute of Technology’s Center for Micro-BioRobotics.
Robotics research has a significant role when utilizing robots for inspection, clean-up, and sample collection in hazardous environments inaccessible to humans. Especially when it comes to radiation environments, their deployment minimizes unnecessary exposure of workers to the harmful effects of radiation (Moore, 1985).
Accordingly, robots have a long history in the nuclear field, from the incident at Three Mile Island, Reactor 2 (TMI-2) in 1979 to the 2011 disaster at Fukushima Daiichi Nuclear Power Plant (Urabe and Stapczynski, 2017).
At TMI-2, robots performed surveillance, inspection, and decontamination tasks following the meltdown (Hess and Metzger, 1985; Lovering, 2009). Soon after the nuclear power plant accident in Fukushima, Japan, the existing Quince robot was modified to perform inspection and sampling tasks in two of the affected units (Nagatani et al., 2011a).
This robot completed several objectives before becoming irretrievably lost (Nagatani et al., 2011b). Recently, equipment specifically designed to operate within Fukushima, including Toshiba’s Scorpion and Sunfish models, have been introduced to perform additional surveillance (Fackler, 2017).
However, most of the deployed robots faced a similar problem: getting stuck or tangled in debris. They also suffered from circuit malfunctions due to high doses of radiation, especially if hardened parts were not used in fabrication (Fackler, 2017).
The contaminated and malfunctioning robots were abandoned inside the reactor, at a total loss of the equipment’s capital cost (Mary-Ann, 2015; Sheldrick and Funakoshi, 2016; McCurry, 2017).
These circumstances raised a central question: Can we use low-cost soft robots in radiation environments? Soft robots provide advantages over rigid robots in terms of body morphing (Laschi et al., 2016), absorbing the energy of an impact or collision (Lee et al., 2017), high compliance (Rus and Tolley, 2015), and cheaper fabrication costs (Hill et al., 2000).
The most significant of these advantages is the robot’s ability to conform to different obstacles and terrains in various radiation environments, especially during passage through non-traditional entryways when doors and access points are blocked.
Moreover, millimetric (Hu et al., 2018; Ranzani et al., 2018) scale soft robots may also provide considerable advantages under radiation environments.
In order to evaluate the effectiveness of soft robots under radiation, the convenience of the fabrication material for the environment plays a crucial role. The earliest investigations of the effect of gamma radiation on polydimethylsiloxane (PDMS) were performed by Charlesby (Charlesby, 1955) and Miller (Miller, 1960) in the late 1950s.
They determined that the degree of crosslinking induced by radiation is a function of dose and demonstrates a direct-response relationship. Charlesby calculated a 32-eV energy absorption requirement per crosslink and Miller calculated a crosslinking yield of 3.0% for irradiation by electrons.
Notably, both studies were performed on the liquid form of PDMS rather than the cured form considered in soft robotic applications. Therefore, to fill this research gap, and to estimate fabricated soft robots’ operation time under radiation, we investigated gamma-induced mechanical damage in PDMS and sent a 3D printed soft robot into an underwater radiation environment.
The main reasons for selecting the 3D printing method over molding to fabricate soft robots will be detailed in the following paragraphs.
To send a soft robot in an unstructured radiation environment for inspection purposes or delivery tasks, it must offer significant dexterity and mechanical compliance, with minimum control requirements.
However, disadvantages of soft robots such as limited afforded strength and payload (Lee et al., 2017), limited control and autonomy (Trivedi et al., 2008; Singh and Krishna, 2014), need for tethering (Majidi, 2014; Schmitt et al., 2018), and limited sensory equipment (Rus and Tolley, 2015; Lee et al., 2017) still need to be overcome.
To meet some of these demands, the soft actuators within the soft robot must enhance their functionality, which is limited by fabrication techniques (Marchese et al., 2015). Since conventional soft robot manufacturing techniques such as lamination casting (also known as soft lithography) (Xia and Whitesides, 1998; Tolley et al., 2014), retractable pin casting (Marchese et al., 2014, 2015), lost wax casting (Sias, 2005; Marchese et al., 2015), and rotomolding (Zhao et al., 2015) restrict possible geometries, shapes, complexity, and scale of the manufactured soft robots, we choose to focus on additive manufacturing (AM) methods (Truby and Lewis, 2016; Walker et al., 2019).
However, the most commonly used AM techniques, such as stereolithography (SLA) (Peele et al., 2015), fused filament fabrication (FFF) (Yap et al., 2016), and PolyJet (Drotman et al., 2017) are not suitable for 3D printing PDMS material for fabricating soft robots (Trimmer et al., 2015; Laschi et al., 2016; Kastor et al., 2017).
One of the first examples of a 3D printed soft actuator (Peele et al., 2015) failed at around 40% strain (after approximately nine cycles) due to photopolymer SLA materials while their molded counterparts fabricated with the PDMS materials were able to undergo more than 600% strain (Mosadegh et al., 2014).
Alternatively, another 3D printed soft actuator manufactured through FFF methods was limited to the NinjaFlex (NinjaTek, PA) thermoplastic material with a Shore hardness of 85A (Yap et al., 2016).
More recent 3D printed soft robots were manufactured with PolyJet technology which allowed researchers to (1) manufacture a quadrupedal robot with soft legs capable of two axis rotation (Drotman et al., 2017), (2) create a material stiffness gradient within the soft robot body (Bartlett et al., 2015), and (3) 3D co-print solids (flexible, rigid) and liquids to fabricate hydraulically actuated components (MacCurdy et al., 2016). However, the commercially available materials (Stratasys, MN) used in this process were limited by Shore hardness (ranging between 27A and 95A).
To overcome strain limitations and use PDMS materials within AM, researchers focused on direct ink writing (DIW) techniques. Ober et al. analyzed the behavior of complex fluids and developed a micro-scale active mixing system for two-part materials, and successfully 3D printed PDMS objects (Hardin et al., 2015; Ober et al., 2015), but they did not demonstrate the fabrication of soft actuators or robots.
Instead of using two-part PDMS materials, Plott et al. used moisture-cured silicone elastomer to successfully 3D print finger pneumatic actuators (Plott and Shih, 2017). Unfortunately, their printing technique restricted the achievable geometry as it required near voidless construction.
Considering the limitations of current state-of-the-art PDMS printing, the soft robotics community has yet to match the performance of the molded functional soft robots made from PDMS materials with 3D printing technology.
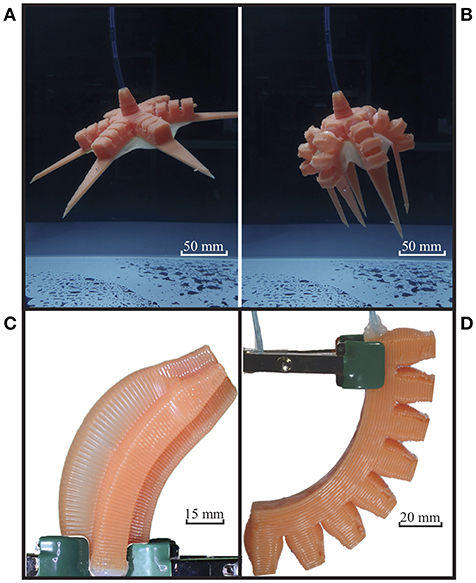
In prior work (Yirmibesoglu et al., 2018), we developed a 3D printer to address this research gap. Here by modifying the previous printer design, we improved the complexity and increased the scale of the fabricated soft robots, which enabled us to 3D print a hexapus robot (Figures 1A,B) for testing soft robots under a radiation environment.
In this work, in order to assess the usefulness of soft robotics under radiation, we selected 3 radiation environments to provide a wide scope of operation.
To estimate fabricated soft robots’ operation time in these radiation environments, we measured gamma-induced changes in mechanical properties such as elongation, tensile strength, and compression of the PDMS material.
The viability of the soft robots under 3 selected radiation environments was analyzed based on PDMS behavior after irradiation. Later, a 3D printed soft hexapus robot (Frame et al., 2018) was operated in a radiation environment, and its absorbed dose rate was measured to estimate its operation time.
By using 3D printing as the fabrication method, we increased design complexity of the hexapus robot, which enabled us to test its operation time under radiation environment. Finally, to ensure the reliability of the 3D printed soft robots we investigated the effects of fabrication methods, nozzle size, and print direction on the stiffness of the PDMS material.
This paper is organized as follows. In section 3D printing of silicone material, we introduced the improvements to the 3D silicone printer that enabled us to 3D print a hexapus robot. In section Materials and methods, we detailed the protocols to measure the effect of gamma irradiation on PDMS material and select radiation environments.
Also, experimental methods and setups for radiation experiments and robot performance comparisons are detailed. In section Results and discussion, we analyzed the changes in the mechanical properties of PDMS samples after gamma irradiation and we measured the gamma irradiation absorbed by the 3D printed hexapus robot submerged into bulk shield tank while repeating pull and push motions.
After that, we conducted blocked force and bend angle experiments to compare the performance differences between our 3D printed soft robots (4 channel tentacle Figure 1C and Pneu-net actuator Figure 1D) and their molded counterparts. We also measured the effects of fabrication methods, nozzle sizes, and print directions on the stiffness of the fabricated PDMS material. Finally, in section Conclusion, conclusions and future work are presented.
Authors also provided a table of the acronyms (Supplementary Table 1) used throughout the paper to help readers.
More information: Anand K. Mishra et al, Autonomic perspiration in 3D-printed hydrogel actuators, Science Robotics (2020). DOI: 10.1126/scirobotics.aaz3918



{kind=link}