










 Extract (6-MSITC) in Healthy Older Adults")
: An In-Depth Exploration into its Thermogenic Role and Social Significance")



Nell’attuale numero di Science Robotics , i ricercatori dell’Istituto Italiano di Tecnologia (IIT – Istituto Italiano di Tecnologia) e del Centro Protesi INAIL in Italia hanno riferito sulla loro capacità di replicare le proprietà biologiche chiave della mano umana: movimento naturale sinergico e adattabile, biomimetico livelli di forza e velocità, elevato antropomorfismo e robustezza della presa.
Sviluppata da una collaborazione di ricercatori, ortopedici, designer industriali e pazienti, la protesi di mano denominata Hannes è in grado di ripristinare oltre il 90% della funzionalità alle persone con amputazioni degli arti superiori.
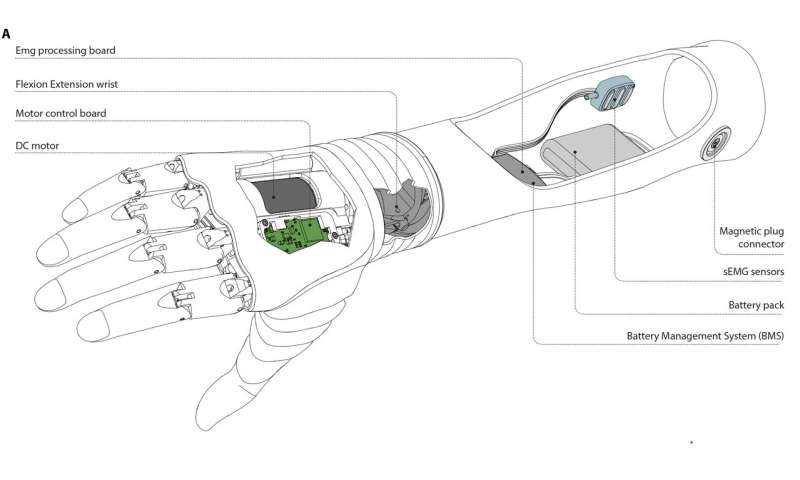
Hannes è un sistema protesico di arto superiore antropomorfo poliarticolato comprendente mano e polso, le cui caratteristiche principali sono la morbidezza e la capacità di adattarsi dinamicamente alla forma degli oggetti da afferrare.
È straordinariamente simile a una mano umana e, essendo sviluppato direttamente con i pazienti, ha un uso pratico immediato.
Per valutare l’efficacia e l’usabilità di Hannes, presso il Centro Protesi Inail sono state eseguite prove pilota su amputati, ei ricercatori hanno scoperto che dopo un periodo di formazione inferiore a una settimana, i pazienti potevano utilizzare autonomamente Hannes per svolgere attività della vita quotidiana.
La protesi è un sistema mioelettrico che può essere indossato tutto il giorno ed è adattabile a una varietà di disturbi agli arti superiori.
Una serie di sensori elettromiografici di superficie posizionati all’interno di una presa personalizzata rileva l’attività dei muscoli residui degli arti nella parte inferiore o superiore del braccio, che vengono attivamente contratti dall’utente per eseguire più movimenti.
Inoltre, attraverso un software appositamente sviluppato e una connessione Bluetooth, è possibile personalizzare i parametri di funzionamento della mano, come la precisione e la velocità dei movimenti, per garantire l’esperienza più ottimizzata per ogni utente.
La mano Hannes è stata testata per la durata e la robustezza in un ambiente che ha simulato più di un anno di utilizzo da parte di un cosiddetto “utente professionista”, della durata di quasi 500.000 cicli di vita.
La mano robotica Hannes è sviluppata in Italia presso l’Istituto Italiano di Tecnologia e il Centro Protesi INAIL. Hannes è in grado di replicare le proprietà biologiche chiave della mano umana ed è in grado di ripristinare oltre il 90% della funzionalità alle persone con amputazioni degli arti superiori. Credito: IIT-Inail
La vera intelligenza di Hannes risiede nella progettazione meccanica, assolutamente unica nel suo settore di mercato, che conferisce alla protesi la versatilità e il movimento di una mano naturale.
Il meccanismo alla base della mano è un sistema differenziale meccanico che consente ad Hannes di adattarsi all’oggetto che viene afferrato utilizzando un solo motore. Questo migliora anche notevolmente le prestazioni grazie alla sua efficienza.
Corrisponde anche al 50 ° percentile della dimensione della mano umana. Hannes è fornito in due misure, 7 ¾ e 8 ¼, per la sostituzione della mano destra e sinistra, ed è adatto a soggetti di sesso femminile e maschile. Il suo peso è di 450 grammi.
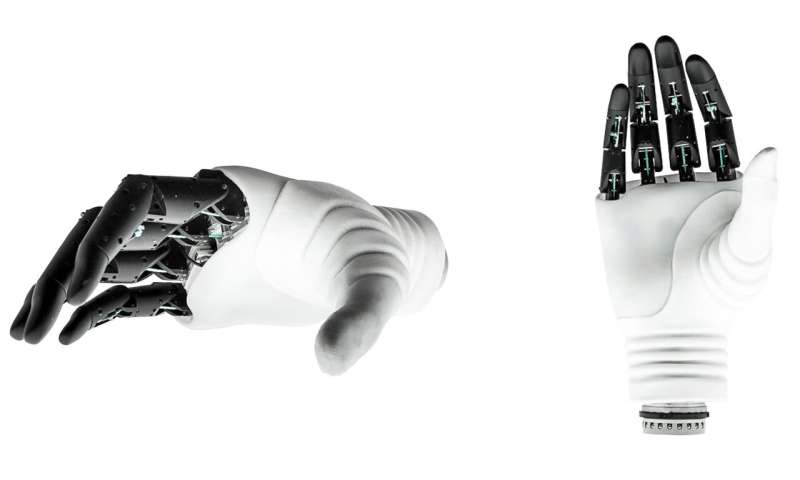

Le dita possono flettersi e essere posizionate in modo naturale, anche a riposo. In particolare, il pollice può essere orientato in tre posizioni per replicare un’ampia varietà di impugnature, inclusa una presa fine per raccogliere piccoli oggetti, una presa laterale per afferrare oggetti sottili e una presa potente in grado di afferrare e spostare anche carichi pesanti.
La presa complessiva è efficiente, robusta contro le condizioni esterne e naturale.
Il sistema consente inoltre la pronazione e la supinazione del polso (“movimento di rotazione della chiave”), consentendo la presa in diversi orientamenti senza fare affidamento su una dannosa compensazione del paziente.
Video di una persona che svolge attività quotidiane mentre indossa Hannes. Credito: Laffranchi et al., Sci. Robot. 5, eabb0467 (2020)
Hannes può eseguire una presa completamente chiusa in meno di un secondo e può esercitare una forza di presa massima di 150 N, che è ben oltre le altre mani poli-articolate commerciali e di ricerca. Ha un’autonomia di un’intera giornata di utilizzo standard (durata della batteria di un giorno: alimentazione 12V per una capacità della batteria di 1300 mAh).
Video di pazienti con amputazioni del braccio inferiore che eseguono test clinici con Hannes. Credito: Laffranchi et al., Sci. Robot. 5, eabb0467 (2020)
I ricercatori hanno condotto esperimenti per convalidare le prestazioni di Hannes e la somiglianza umana del suo comportamento di presa e hanno dimostrato prestazioni migliori rispetto alla ricerca esistente e ad altri dispositivi commerciali.
La biomimetica, una tendenza presente in molti campi scientifici, è conosciuta e utilizzata dagli ingegneri da molti anni [1,2]. Questo termine sta per imitare elementi, tecniche e sistemi naturali allo scopo di risolvere molti problemi umani [3,4].
Soluzioni naturali, migliorate da migliaia di anni di evoluzione, furono l’ispirazione per molte invenzioni, dove la più conosciuta, considerata da Leonardo da Vinci e costruita dai fratelli Wright, fu il primo aeroplano, di cui si basava la forma delle ali di uccelli [3].
Ci sono molti esempi di tali soluzioni: il trigger di Schmitt, ispirato alla propagazione dell’impulso neurale dei calamari, il meccanismo a velcro, osservato su frese di bosco attaccate al pelo di cani, treni, forme che imitano il martin pescatore che si tuffa in acqua, o il moderno movimento / forma animale robot [5–12].
La soluzione più importante, dal punto di vista di questo articolo, è contenuta in noi stessi.
Il ruolo di biomimizzare la mano umana, lo strumento più abile mai conosciuto, acquisì un significato speciale durante la seconda guerra mondiale, quando il numero degli amputati aumentò improvvisamente [13,14].
Per recuperare la loro funzionalità sono state applicate delle semplici protesi non elettriche che permettevano di eseguire una presa a pizzico. La loro costruzione meccanica era basata su un gancio attaccato al polso e un unico filo collegato tra esso e la schiena. La flessione del braccio tirava il filo, spostando così il gancio [15–17].
Successivamente, iniziarono ad apparire mani robotiche elettriche a forma umana, ma questo era nel 1967, quando tali mani divennero disponibili in commercio e fu solo nel 1977 che iniziarono ad avere importanza medica [18].
Da allora, la continua crescita dell’automazione e dell’esplorazione spaziale ha indotto un aumento di nuove applicazioni per le mani artificiali: le teleoperazioni. Gli ambienti pericolosi, come quelli radioattivi, chimici o biologici, richiedono di seguire rigorose procedure di sicurezza ed è meglio evitare la presenza umana in quelle aree.
Questo vale anche per l’attività extraveicolare (EVA) [19-22]. Per consentire a un operatore di lavorare con una mano robotica mobile, dovrebbe avere una gamma di mosse più simile a quella umana, il che significa che entrambi
si devono ottenere potenza e una presa precisa. Come prova, [23] ha mostrato che solo 29 dei 195 strumenti EVA potevano essere usati con una sola mano. A tal fine, distinguiamo tra una mano che tiene e una mano che aziona. Il miglioramento della destrezza dovrebbe andare di pari passo con una forma e dimensioni naturali per un migliore feedback visivo e operazioni di amore; come [24] ha giustamente detto, “un essere umano troverà più facile controllare una mano robotica con funzioni come la propria mano”.
La fine del XX e XXI secolo ha portato un grande progresso tecnologico.
Ciò si applicava a nuovi materiali, capacità di elaborazione, tecniche di progettazione e miniaturizzazione di dispositivi e metodi esistenti [25–27]. I nuovi sensori tattili non solo hanno dimensioni ridotte, ma sono anche elastici, il che li rende più facili da posizionare [28–30], analogamente ai motori DC dove, al posto dei vecchi, vengono utilizzati dispositivi ad alta densità di potenza. Inoltre, i muscoli artificiali come le leghe a memoria di forma (SMA), i polimeri ritorti e arrotolati (TCP), gli elastomeri dielettrici (DEA) e altri stanno guadagnando popolarità [31-35].
Gli attuatori interi danno la possibilità di installarne di più sul palmo o sul dritto, aumentando quindi il numero di gradi di libertà (DOF) [36–38]. Secondo il materiale e le tecniche di fabbricazione, la stampa 3D è indiscutibilmente l’innovazione più importante, in quanto rende la prototipazione e la sostituzione di parti molto più veloci ed economiche [39,40].
Oggigiorno, ad eccezione delle ben note soluzioni sopra descritte, l’importanza dei robot umanoidi sta aumentando [20,41,42]. L’imminente esplorazione di Marte avrà bisogno dell’aiuto di robot con abilità abili per costruire una base [43,44]. Tuttavia, la Terra è un luogo in cui tali robot sarebbero i più appropriati.
L’analisi demografica, condotta dal Giappone, ha mostrato che, entro la metà del 21 ° secolo, circa il 30% della popolazione giapponese avrà più di 65 anni. Allo stesso tempo, un numero decrescente di nascite causerà un’enorme domanda di robot che possono coesistere con esseri umani e prenditi cura di loro [45–47].
Questo e altri argomenti mostrano un futuro promettente per le mani artificiali, ma c’è ancora molta strada da fare per progettare un dispositivo che possa competere con una mano umana.
Lo scopo di questo articolo è di rivedere le mani artificiali sviluppate da gruppi di ricerca scientifica sin dagli anni ’80, nonché di discutere di nuove tecnologie. Il documento affronta il tema della costruzione meccanica attraverso metodi di attuazione e trasmissione, terminando sulla tecnologia sensoriale applicata. L’analisi di oltre 80 dispositivi fornisce le tendenze che le mani robotiche seguiranno nel prossimo futuro.
Inoltre, va notato che i dispositivi analizzati sono stati cercati in tutti i database scientifici disponibili con le frasi “mano artificiale” e “mano robotica”. Inoltre, a causa della grande quantità di dati, la tabella con un confronto completo di tutti i termini menzionati è inclusa in un archivio esterno [48].
Panoramica e valutazione della mano umana
Principi naturali
Al fine di comprendere meglio la struttura e lo scopo della mano e per introdurre la nomenclatura utilizzata in questo documento, i principali sistemi del corpo sono descritti di seguito.
La mano umana è composta da cinque dita: pollice, indice, medio, anulare e mignolo, numerate rispettivamente da 1 a 5. Il suo sistema scheletrico è composto da 27 ossa, di cui otto sono carpali e cinque metacarpi. Le cifre da 2 a 5 hanno tre ossa ciascuna, chiamate falangi: prossimale, medio e distale.
Il pollice è diverso dalle altre dita e ha solo due ossa, quella prossimale e quella distale (Figura 1). I legamenti tra le ossa appropriate creano articolazioni che consentono loro di muoversi in particolari direzioni e distanze.
Si possono distinguere tre tipi principali di articolazioni: le articolazioni interfalangee prossimali (PIP), interfalangee distali (DIP) e interfalangee (IP) sono semplici articolazioni a cerniera, il che significa che possono muoversi su un asse. Un altro tipo è il condiloide, che forma le articolazioni metacarpo-falangea (MCP) e consente il movimento biassiale, ovvero flessione o estensione e adduzione o abduzione.
Il terzo e più importante è l’articolazione della sella del pollice, il carpometacarpo (CMC). A causa della costruzione specifica, questo giunto fornisce il movimento triplano, cioè flessione o estensione, abduzione o adduzione e rotazione. Va notato che il giunto CMC è definito come un giunto con due gradi di libertà perché non è possibile eseguire in modo indipendente un terzo movimento. Tuttavia, come risultato di queste tre azioni, il pollice umano può eseguire l’opposizione, il che lo rende unico [49,50].
La controversa questione della cinematica della mano è l’opposizione del mignolo. Levangie in [51] ha descritto le articolazioni CMC delle dita 2-5 come segue: la seconda e la terza possono essere considerate aventi 0 DOF, la quarta è l’articolazione sinoviale piana con 1 DOF (flessione o estensione), e la quinta è una Articolazione a sella 2 DOF che consente flessione, estensione, alcune abduzioni, adduzioni e opposizione limitata.
Al contrario, la cinematica della mano umana in [52,53] includeva le articolazioni CMC dell’anello e del mignolo come due articolazioni biassiali. Poiché la risoluzione di questa controversia non è negli obiettivi di questo articolo, il termine generale di
“opposizione del mignolo” viene utilizzato nelle sezioni seguenti.

(b) teoria del filamento muscolare scorrevole (basata sulla figura di basicphysiology.com).
I muscoli sono attuatori unidirezionali naturali, quindi lavorano principalmente in coppie opposte. Un’unità di base della fibra muscolare è un sarcomero. È costituito da filamenti sottili (actina) e spessi (miosina). Il meccanismo di contrazione è descritto dalla teoria del filamento muscolare scorrevole in cui, generalmente, i filamenti spessi scivolano su quelli sottili.
Di conseguenza, un muscolo si accorcia e il suo volume aumenta contemporaneamente. Più di 30 muscoli della mano potrebbero essere classificati in base alla loro posizione; quelli nell’avambraccio rispondono a prese di forza e quelli nella mano a prese e manipolazioni precise [54,55].
La trasmissione del movimento è effettuata dal sistema tendineo. Il tessuto connettivo elastico, collegato tra muscoli e ossa, scorre in guaine che non solo ne impediscono lo sfregamento, ma lo mantengono al posto giusto vicino alle dita. Ci sono connessioni tendinee semplici e dirette e anche complesse, cioè il meccanismo estensore, altrimenti chiamato rete tendinea.
La struttura del meccanismo estensore combina le forze di muscoli come interosseo, lombalgia ed estensore delle dita che, a seconda della sequenza, consentono di eseguire diversi movimenti delle dita [49,56].
Il sistema nervoso è l’unità di controllo di un organismo che trasmette segnali da e verso diverse parti del corpo. Poiché non è necessario spiegare i principi del meccanismo di rilevamento degli arti superiori, i più significativi sono elencati come segue: tensione della fibra muscolare, velocità di contrazione muscolare e rilevamento del tatto della pelle (pressione, scivolamento, vibrazione, temperatura e dolore).
Inoltre, l’elaborazione di questi dati avviene insieme alla visione, al nostro senso dominante e ai propriocettori forniscono informazioni sull’angolo articolare e sull’orientamento della parte del corpo [55,57-60].
Ci sono molte strategie per determinare la mobilità della mano, e i primi lavori su di essa presupponevano fattori come le parti della mano usate nella presa, la forma dell’oggetto, la posizione finale e la geometria [19,61].
Tuttavia, nel 1956, Napier ha suddiviso i compiti in azioni prensili (un oggetto viene afferrato o trattenuto) e non prensili (attività passiva della mano come sollevare o tenere un oggetto) [61]. Ha anche considerato che la stabilità della presa è necessaria per le operazioni manuali corrette. Poiché ciò potrebbe essere ottenuto tenendo un oggetto
tra le dita e il palmo, o le dita e il pollice opposto, le prese erano classificate come potenti o precise. Le soluzioni di cui sopra sono state utilizzate e pubblicate da Cutkosky come tassonomia della presa in cui il primo livello dell’albero è diviso in presa precisa e potente, e poi si dirama in prese che dipendono dalla geometria dell’oggetto [62].
Questa classificazione e molte altre sono state incorporate nel recente lavoro di Feix et al., Che fornisce molti più dettagli sulle proprietà di presa (Figura 2).

La tassonomia ha un numero totale di 33 prese suddivise nei seguenti aspetti:
- potere, intermedio e presa di precisione;
- tipo di opposizione del pollice: palmo, pad e lato;
- adduzione o abduzione del pollice; e
- dita virtuali, numero di forze applicate in diverse direzioni.
Esame della mano artificiale
Al fine di confrontare una mano robotica con quella di un essere umano, è necessario considerare metodi di confronto. Comunemente utilizzato dalla maggior parte dei ricercatori è un’indagine su quante prese, dalla tassonomia Cutkosky e Feix, il dispositivo è in grado di eseguire. Un esame più complesso, nella compliance protesica, è il test Southampton Hand Assessment Procedure (SHAP) [64], dove viene testata la dinamica dell’intero sistema protesico. Consiste di due compiti, in cui prima un amputato deve manipolare sei oggetti astratti.
La seconda parte comprende 14 attività di vita quotidiana (ADL). Se l’utente non è in grado di completare un’attività entro 100 s, viene considerata un errore. Un altro è stato introdotto da Kapandji [65] per esaminare le capacità di opposizione del pollice semplicemente toccando varie parti della mano con la punta del pollice.
In contrasto con i metodi sopra menzionati che consentono un confronto di una mano robotica con una mano umana, Biagiotti et al. [66] ha proposto un approccio ai dispositivi di contrasto con indici definiti.
Il livello antropomorfo tiene conto di tre caratteristiche, cinematica, superfici di contatto e dimensioni. Definisce inoltre il potenziale indice di destrezza di una data costruzione meccanica; quindi, la presa e la manipolazione del polpastrello o dell’intera mano sono valutate. Inoltre, è stato considerato l’indice del sistema sensoriale; quindi, sono stati indicati angolo, tattilità, forza o tensione e sensori aggiuntivi.
Sensori
Gli esseri umani senza i loro sensi potrebbero essere paragonati alla prima macchina automatica in grado di eseguire alcuni lavori ma non rispondere a nessuna informazione dall’ambiente. Ciò ha portato a problemi evidenti, dove i più importanti e pericolosi erano l’autolesionismo o lesioni a qualcun altro. Poiché lo scopo delle mani artificiali è quello di imitare le capacità più avanzate degli esseri umani, deve essere considerato con i sensi-sensori appropriati.
Un tipo base di feedback è la posizione angolare che può riguardare sia la posizione del giunto che quella dell’attuatore. Poiché i sistemi elettronici dei servomotori forniscono informazioni angolari e i motori CC possono essere facilmente integrati con encoder e attuatori pneumatici con manometri / sensori [89,110,136], più difficile è applicare un’apertura appropriata nei giunti a pettine. Invece dei potenziometri [82,115], che introducono una correlazione meccanica e attrito indesiderati, i sensori a effetto Hall senza contatto con alta risoluzione e buona ripetibilità sono una soluzione migliore [121,138].
Il principio di funzionamento si basa su un magnete diametralmente magnetizzato posto concentricamente in un giunto che viene rilevato da un sensore. Contrariamente ai magneti circolari comunemente usati, i magneti ellissoidali sono usati in Robonaut Hand 2 perché quella caratteristica sia più lineare [168]. Gli estensimetri e i sensori di flessione sono usati raramente a causa di installazione problematica, caratteristiche non lineari e bassa risoluzione [80,108].
Una mano robotica con un anello di posizione chiuso è in grado di eseguire tutti i gesti possibili, limitati solo dalla distanza articolare. Questa situazione cambia diametralmente quando la forza esterna viene applicata da un oggetto manipolato o da una collisione con le dita. Per prevenire potenziali danni, vengono applicati metodi di raccolta dei dati relativi a forza, coppia e tensione.
La tecnica convenzionale presuppone la stima della coppia misurando la corrente del circuito dell’attuatore, usata in [73] e [90], che è ben nota e sviluppata, ma una serie di fattori potrebbe disturbare il modello matematico. Uno di questi era incluso nella mano RoboRay, quindi l’algoritmo di controllo compensava l’attrito che si verificava nell’intera costruzione [137].
In opposizione al posizionamento angolare, una forza incarica l’implementazione di estensimetri in varie forme. Ad esempio, in [38], il tendine è scivolato su una puleggia che è stata posizionata sull’estensimetro in modo che la tensione fosse controllata con coppie di giunzione fino a 130 N; in Gifu Hand II, un sensore di forza a sei assi era incluso nella punta delle dita, che era basato su misuratori [36] e molti altri [23,139]. Ancora una volta, Robonaut Hand 2 ha presentato una soluzione originale in cui è stato osservato che la forza di compressione del condotto (che copre il tendine) era uguale alla tensione del tendine con un errore del 5% –10% [168].
Andando avanti, sono state presentate la disparità di posizione angolare con lo spostamento della molla [82,111] e le differenze nella pressione della camera dell’attuatore [93], ma il metodo più innovativo coinvolgeva gli elementi fotoattivi [115]. Gli autori in [178] hanno costruito un sensore di tensione in miniatura costituito da una forma a forcella che aveva un diodo LED e un fototransistor sui lati del gap.
Una cornice elastica ricopriva l’intera parte, mentre uno schermo attaccato al lato interno della cornice interrompeva il fascio di luce. Quando il tendine ha tirato la superficie elastica, la quantità di luce rilevata è aumentata, quindi la tensione è cambiata. Test approfonditi hanno confermato che i sensori posizionati sulla punta delle dita possono resistere a forze fino a 200 N con caratteristiche molto lineari e generalmente senza isteresi.
Il fattore mancante che separa dalla manipolazione in mano e dai parametri di presa accurati è la prensione tattile della mano umana. La sfida principale è imitare i meccanocettori della pelle umana responsabili dell’interazione con l’ambiente e fornire sofisticate informazioni prensile. Mentre i meccanismi naturali consentono di rilevare fenomeni come vibrazioni, tatto e pressione, lo stato dell’arte della robotica è risultato essere in una fase di introduzione di sottili sensori elastici.
Nonostante i semplici sensori di contatto [45,77,121] di cui la funzione, fatta eccezione per le forze del palmo e laterali, potrebbe essere sostituita dalle soluzioni sopra descritte, ci sono più efficienti: resistori sensibili alla forza. Sono guaine relativamente flessibili costruite in polimero conduttivo che cambia la resistenza a causa della forza o della pressione esterna.
Sebbene la loro architettura consenta di ottenere solo misurazioni a forza singola, sono spesso implementate su dita e cifre [72,89,127,138]. È apparso un sensore array 3 × 3 più sviluppato
in [75], così come un sensore tattile 4 × 4 e di 0,1 mm di spessore fornito da Tekscan Inc. [100]. Questi non possono competere con il Gifu Hand II, dove è stato applicato il numero totale di 624 punti di rilevamento per l’intera costruzione [36].
Degna di nota è la tecnologia Quantum Tunneling Composite (QTC), i cui prodotti sono composti di metalli e polimeri non conduttivi che, a causa della forza / pressione esterna, cambiano la loro resistenza [60]. I sensori utilizzati nella mano Shadow forniscono 34 punti di misurazione indipendenti su ciascun polpastrello [131].
Per una migliore ricerca e un’ampia descrizione della tecnologia, vale la pena controllare [179] che è completamente dedicato alla tecnologia dei sensori della mano robotica.
Un alto potenziale riferito a sofisticati metodi di rilevamento tattile risiede nella tecnologia dei materiali in rapida espansione che interessa molti campi scientifici, ad esempio la robotica. Per illustrare meglio questo fenomeno, le ricerche in Google Scholar con frasi come “sensore tattile” e “pelle artificiale” sono state classificate in base al periodo di tempo appropriato nella Figura 7.

Ciò mostra chiaramente che il numero di pubblicazioni e quindi di soluzioni disponibili è in aumento. Di conseguenza, se si tiene conto dello stato dell’arte e delle tendenze di cui sopra, si potrebbe dire che i dispositivi futuri non solo forniranno misurazioni ad alta risoluzione, riconoscimento della superficie e versatilità, ma potrebbero anche fornire informazioni sui potenziali danni (dolore) e anche la temperatura.
link di riferimento: doi: 10.3390 / app9194090
Maggiori informazioni: M. Laffranchi el al., La protesi della mano Hannes replica le proprietà biologiche chiave della mano umana, Science Robotics (2020). DOI: 10.1126 / scirobotics.abb0467
Una mano protesica più umana, Science Robotics (2020). robotics.sciencemag.org/lookup… /scirobotics.abd9341



{kind=link}