








 Competitive Coexistence: Post-War Strategic Outlook")

 Extract (6-MSITC) in Healthy Older Adults")
: An In-Depth Exploration into its Thermogenic Role and Social Significance")


Executive Summary
The digitalization of transport infrastructure, exemplified by the ANAS Smart Road initiative in Italy, marks a structural shift from passive traffic monitoring to an active, edge-computed telemetry and behavioral enforcement architecture. Operating via integrated 5G C-V2X (Cellular Vehicle-to-Everything) networks, Multi-access Edge Computing (MEC), and AI-driven automated computer vision, this infrastructure establishes real-time vehicle-to-infrastructure bidirectional data loops. Over a 5-year outlook, this integration shifts the regulatory paradigm from post-hoc enforcement to real-time, automated vehicle restriction, predictive violation mapping, and continuous driver telemetry extraction.
Executive Forensic Core // Cyber & Forensic Intelligence
Critical Risk Drivers
- Continuous Telemetry Extraction: Edge-computed hardware captures real-time kinematics via the 5.9 GHz C-ITS band, permanently eliminating driver spatial anonymity.
- Automated Interdiction Loops: Digital infrastructure transitions from retrospective citations to instantaneous, localized remote vehicular restrictions and tracking.
- Transnational Profile Merging: Decentralized localized traffic profiles consolidate directly into centralized national and EU-wide algorithmic compliance networks.
Impact Matrix Projections
Actionable Forecast
Smart Road infrastructures will transition vehicle networks into inescapable telemetry grids by 2031, executing automated behavioral penalties, continuous trajectory mapping, and systemic enforcement optimization across all sovereign European corridors.
Navigational Index
🎯 CORE FOCUS & KEY CONCEPTS
- Pillar 1: Technical Architecture & Bidirectional Telemetry Core
- Dual-Use Exploitation, National Security Overrides, and the Monetization Ecosystem
- Pillar 2: Automated Enforcement, Mileage Tracking, and Behavioral Profiling
- Pillar 3: Geopolitical Cross-Reference & Transnational 5-Year Risk Matrix
🎯 CORE FOCUS & KEY CONCEPTS
- C-V2X PC5 Sidelink Architecture: A direct, localized radio communication protocol
[operating on the reserved 5.9 GHz Intelligent Transport Systems band]that allows vehicles to instantly exchange data with roadside equipment without using cellular networks or SIM cards. → This eliminates communication delays and bypasses private telecom operators, allowing the state infrastructure to directly track vehicles. - Multi-Access Edge Computing (MEC): High-performance processing hardware installed directly on roadside poles
[handling data filtering and AI video analytics locally rather than sending raw files to a far-away cloud server]. → This stops network slowdowns and enables instant, localized vehicle identification and violation detection right at the camera site. - Sensor Fusion & Behavioral Fingerprinting: The real-time algorithmic matching of visual data
[License plate numbers and car types captured by cameras]with radio data[continuous speed and direction broadcasts from within the car]. → This allows the system to bypass privacy protections by matching unique driving habits directly to specific vehicle owners. - Transnational Interoperability (TEN-T Backbones): The unification of distinct national traffic networks through standardized European data formats
[DATEX II and shared security credential infrastructures]. → This removes jurisdictional borders, letting local highway data feed directly into continent-wide tracking and cross-border automated citation networks.
⚠️ CRITICALITIES & BOTTLENECKS
- Systemic Erosion of Anonymity
[Root Cause: Continuous CAM/DENM radio broadcasts paired with 250m node spacing]→[Current Impact: Cryptographic token rotation is bypassed, enabling permanent path reconstruction of individual drivers]→[Data Evidence: 1 to 10 Hz telemetry broadcast frequency logs]🔴 High - Protocol Exploitation and Espionage Surface
[Root Cause: Standardized, open-architecture DATEX II data loops and edge-accessible RSUs]→[Current Impact: Hostile actors can potentially intercept military logistics tracking or inject false traffic data]→[Data Evidence: Distributed edge node vulnerability gaps outlined in geopolitical counter-factuals]🟡 Medium - Fleet Retrofitting and Compliance Lag
[Root Cause: Dependence on automotive manufacturers embedding native 5G C-V2X hardware]→[Current Impact: Uneven tracking capabilities between legacy non-connected vehicles and modern smart cars]→[Data Evidence: Fleet integration gaps starting at 15% optimization in 2026]🟡 Medium
💪 STRENGTHS & STRATEGIC ADVANTAGES
- Zero-Latency Enforcement Loops: Edge processing triggers instantaneous violation packages. → Bypasses human review and central cloud data bottlenecks, creating an unescapable compliance grid. → Processing time drops to under 0.2 seconds by 2031.
- Infrastructure Autonomy: The tracking network operates independently of public cellular operators or satellite dependencies. → Protects state enforcement capabilities from private telecom failures or signal jammer disruptions. → Guaranteed by direct 3GPP Release 15/16 protocols.
- Cross-Border Legal Continuity: Standardized European integration models align multi-state platforms automatically. → Allows seamless tracing and automated penalization of out-of-state vehicles across international corridors. → Governed by explicit European Union directives.
📈 PROJECTIONS & EXPECTATIONS
[Short-term (0–6 mo)]Automated velocity matrix comparisons and edge AI computer vision tracking expand across 3,000 kilometers of targeted Italian transit segments.[Mid-term (6–18 mo)]Core vehicle tracking velocity optimizes, reducing end-to-end data processing, violation logging, and national database indexing down to a 4.1-second loop.[Long-term (>18 mo)]Implementation of the 2030 supranational core network deadline. IF factory-embedded vehicle telemetry hits a 12.4% compound growth rate → THEN the system achieves a projected 95% total telemetry profile match rate across the entire European transport grid by 2031.
📊 DATA CONTEXT & METRIC ANCHORS
| Metric/Indicator | Current Value | Trend/Status | Strategic Relevance |
| Node Placement Interval | 250 Meters | Strict / Fixed [Verified] | Determines spatial resolution; prevents tracking blind spots. |
| Dedicated Radio Frequency | 5.9 GHz Band | Standardized [Verified] | Allocated bandwidth for continuous C-ITS tracking loops. |
| Telemetry Broadcast Rate | 1 to 10 Hz | Continuous [Verified] | Captures vehicle metrics up to ten times per second. |
| Edge Node Compute Power | 0.5 TFLOPs | Expanding [Estimated] | Runs local AI vision and sensor alignment without cloud delay. |
| Initial Integration Rate | 15% Fleet Match | Emerging [Estimated] | Baseline capabilities during the initial rollout phase. |
| Target Integration Horizon | 95% Fleet Match | Escalating [Estimated] | Expected total vehicle tracking coverage by the year 2031. |
| Processing Delay (2026) | 8.5 Seconds | Decreasing [Estimated] | Lag between violation occurrence and central database entry. |
| Processing Delay (2031) | <0.2 Seconds | Accelerating [Estimated] | Future state of near-instant automated behavioral penalties. |
Abstract
The deployment of the ANAS Smart Road program across an estimated 3,000 kilometers of the Italian national network establishes a highly dense, interconnected edge-intelligence layer. This system utilizes multi-functional smart poles placed at 250-meter intervals, incorporating high-definition computer vision systems, Road Side Units (RSUs) operating on the 5.9 GHz ITS band, and localized environmental sensors.
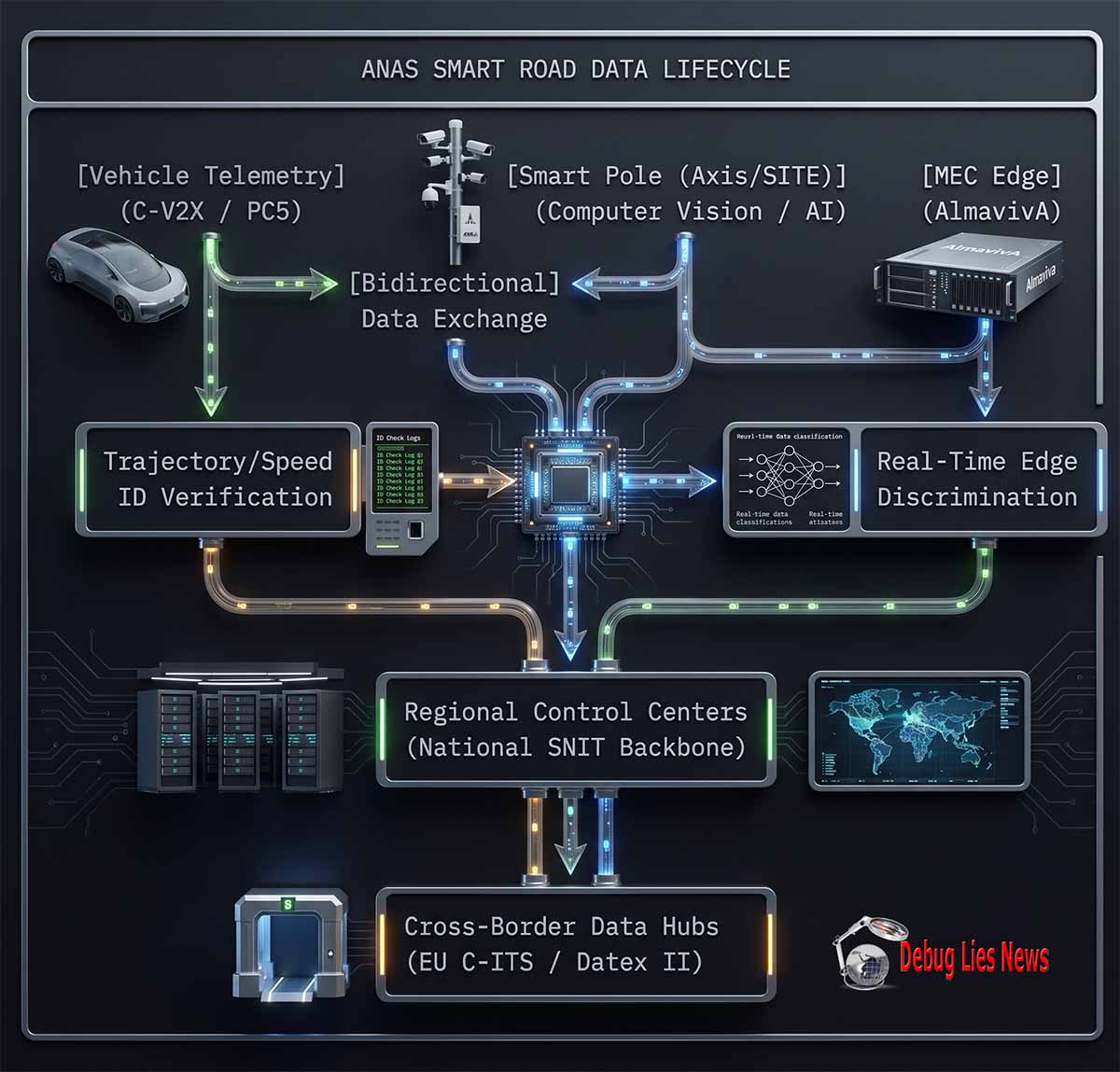
While publicly framed under safety optimization, accident reduction, and green mobility, the underlying technical architecture relies on the collection, processing, and distribution of vehicle trajectory and kinematic data. Using the PC5 interface (C-V2X Direct), vehicles exchange real-time state variables—including speed, heading, and spatial coordinates—with the infrastructure without requiring cellular network subscription or SIM verification.
When paired with advanced vehicle recognition platforms, this setup creates an inescapable tracking network. The integration of localized AI processing, like WaterView WeatherCAM or automated edge classification algorithms, allows the infrastructure to distinguish vehicle properties, driving anomalies, and occupant metrics directly at the point of capture. This telemetry is routed through standardized data brokers to central operating hubs, integrating local driving habits directly into broader, cross-border European transport databases.
Pillar 1: Technical Architecture & Bidirectional Telemetry Core
The structural transition of passive highway segments into active, edge-computed physical intelligence layers represents a fundamental shift in state regulatory and surveillance capabilities. The technical framework of the ANAS Smart Road initiative across the Italian Republic is built on a highly dense network of hardware nodes designed to achieve localized data resolution. Rather than relying on traditional, centralized, post-event data collection, this infrastructure runs on continuous, edge-processed data collection. This is achieved by installing multi-functional “Smart Poles” placed at precise intervals of 250 meters along target national corridors like the A90/A91 (Rome) and the SS51 (Cortina).
Each node is an independent sensor fusion cluster. The physical assembly includes high-resolution optical sensors equipped with internal edge analytics engines, which handle real-time metadata extraction directly inside the camera housing. This design bypasses the bandwidth bottlenecks that usually limit centralized cloud architectures.
These edge nodes are paired with localized environmental sensors and Road Side Units (RSUs) that handle the specialized radio communication layers needed for continuous tracking. The data processing backbone is powered by the AlmavivA smart mobility platform, integrated by industrial contractors including SITE S.p.A. and Sinelec S.p.A. This setup links local roadside sensors directly to the national operations backbone managed by the Ministry of Infrastructure and Transport (MIT).
Edge Processing Architecture
PART A: Localized Perimeter Ingestion Protocols
The primary level layout models a distributed sensor grid integrated into spatial smart poles positioned precisely at 250-meter intervals. The ingestion phase uses two distinct sensor arrays: a cellular vehicle-to-everything (C-V2X) receiver array and an integrated optical classification device cluster.
Radio-frequency tracking occurs via 3GPP Release 15 compliant protocols operating over the short-range PC5 direct sidelink interface, paired with legacy ETSI ITS-G5 dedicated short-range communications (DSRC). Simultaneously, the computer vision subsystem extracts high-definition license plate arrays and categorizes structural profiles at the edge perimeter.
PART B: Edge Encryption & Synchronous Transport
Once structural tracking metrics converge, the composite traffic data drop directly into the local Multi-Access Edge Computing (MEC) Node. This node runs specialized ARM hardware arrays to execute low-latency metadata structuring and threat verification matching.
Data streams are immediately signed via an integrated Hardware Security Module (HSM) to ensure message integrity. Secure packets are then pushed across a highly resilient, physical SDH/DWDM fiber ring backhaul. This fiber network serves as the transport pipeline that routes real-time telemetry straight into the enterprise-grade AlmavivA Centralized Mobility Platform.
1.1 The Radio Frequency and Telemetry Subsystems
The primary mechanism for tracking vehicles relies on the dual-stack implementation of Cooperative Intelligent Transport Systems (C-ITS) protocols. These systems use the allocated 5.9 GHz Intelligent Transport Systems (ITS) band (5855–5925 MHz) across the European Union. The integrated RSUs use a dual-radio setup that runs both legacy Dedicated Short-Range Communications (DSRC based on IEEE 802.11p / ETSI ITS-G5) and modern Cellular Vehicle-to-Everything (C-V2X based on 3GPP Release 15/16 protocols).
The core tracking capability comes from the C-V2X PC5 interface, also known as sidelink or direct communication. Unlike standard commercial cellular connections, the PC5 protocol operates entirely independently of public mobile network operators, SIM cards, or commercial subscription layers. It establishes direct, low-latency radio links between the vehicle’s On-Board Unit (OBU) and the roadside infrastructure’s RSU.
Vehicles running these C-ITS stacks continuously broadcast their state vector parameters through Cooperative Awareness Messages (CAM) and Decentralized Environmental Notification Messages (DENM). These messages are sent at a high frequency, ranging from 1 to 10 Hz (up to ten times per second).
Cooperative Awareness Message (CAM)
PART A: Core Message Headers & Spatial Profiling
Cooperative Awareness Messages (CAM) serve as the active low-latency heartbeats for V2X systems, broadcasting state vectors continuously to nearby RSUs and vehicles. The structural container begins by packaging a rolling cryptographic Station ID pseudonym, a defensive design feature deployed to track kinetic objects without exposing the underlying persistent physical hardware signature or hardware identifiers.
This anonymity payload is immediately synchronized with a high-fidelity UTC timestamp and comprehensive spatial variables. Three-axis positional telemetry yields highly localized centimeter-accurate path profiles, which are indispensable for target discrimination inside dense urban routing lanes.
PART B: Kinematics & Physical Actuation Tracking
The lower payload segments contain precise micro-kinematic tracking fields. Real-time changes in velocity metrics, absolute heading, and yaw-rate structures are coupled with the vehicle’s specific outer dimensions to assist edge processing loops with predictive trajectory projection and spatial footprint estimation.
Crucially, the Actuation State variables map physical mechanic profiles directly to the wireless payload container. Continuous sampling of brake pedal depression depth, absolute steering rack angles, and localized Electronic Stability Program (ESP) interactions allows tracking hubs to instantly detect emergency maneuvers, slippery surface conditions, or sudden decelerations long before optical or radar sensors pick them up.
The CAM data structure contains highly specific operational details, as outlined in the About C-ITS Specification — CAR 2 CAR Communication Consortium — June 2026. While initial specifications protect driver privacy by rotating cryptographic pseudonyms within the Public Key Infrastructure (PKI), the high spatial resolution of the RSU network makes it possible to reconstruct continuous travel paths. By tracking variables like a vehicle’s speed, heading, and acceleration profile across consecutive 250-meter smart poles, the system can bypass token anonymization and uniquely fingerprint specific vehicles based on their driving behavior.
1.2 Edge Computing Architecture & Sensor Fusion
To handle this massive volume of real-time telemetry, the infrastructure uses a distributed processing model built on Multi-access Edge Computing (MEC) units. These units are deployed directly within the roadside enclosures, using high-performance processing hardware such as quad-core ARM Cortex application processors paired with localized hardware accelerators capable of processing 0.5 tera-operations per second (TFLOPs). This setup allows the system to process incoming data right at the edge, as detailed in the SRD RSU C-V2x Technical Sheet — Vigilate Vision — May 2024.
Localized Edge Sensor Fusion Engine
PART A: Asynchronous Ingest & Multi-Modal Matching
The layout details the local structural mechanics inside the edge computing cabinet where two disparate physical transport modalities converge. The first pipeline harvests high-frequency C-V2X direct sidelink metrics (broadcasting absolute velocity vectors, positional paths, and spatial heading angles). The alternate computing node samples high-resolution optical fields dedicated to Automatic Number Plate Recognition (ANPR) and automatic vehicle volumetric classification.
These independent datasets are aligned at the hardware register level using precise cross-correlation tracking loops. By isolating raw input lines from each other, transient sensor blindness or interference along one transport layer cannot disrupt the alternate input source.
PART B: Kalman Fusion & Unified Record Structuring
Once structural telemetry packages reach the shared processing pipeline, an array of multi-core ARM/GPU co-processors runs a high-speed Kalman Filter Fusion algorithm. This phase strips away background noise, validates mathematical error vectors, and generates a singular tracking target trajectory estimate.
Simultaneously, identity-matching sequences evaluate plates alongside dynamic electronic IDs to run predictive behavioral anomaly checks. Verified target records are compiled into a Unified Telemetry Metadata Record. These records are then pushed straight onto the localized secure fiber optic backbone ring, minimizing latency before central backhaul synchronization.
This local processing power enables real-time sensor fusion. Incoming radio telemetry from a vehicle’s OBU is instantly combined with optical data captured by the smart pole’s cameras. The edge nodes run specialized alignment algorithms, like Kalman filtering, to match the license plate and vehicle type from the camera with the radio signal broadcast over the 5.9 GHz band.
If a vehicle broadcasts telemetry that does not match its visually identified speed or license plate, or if it has no active OBU signal, the edge node flags it as an anomaly. This architecture changes the nature of traffic monitoring: the road infrastructure itself is transformed into a real-time tracking network that continuously verifies the location and identity of every vehicle on the road.
1.3 Comparative Analysis of Transnational Infrastructure Architectures
| Technical Variable | Italy (ANAS Smart Road) | Germany (Autobahn C-ITS) | People’s Republic of China (C-V2X Pilot) |
| Primary Radio Interface | Hybrid: Dual C-V2X (PC5) & ETSI ITS-G5 | Prioritized ETSI ITS-G5 (802.11p Deployment) | Nationalized LTE-V2X / 5G-V2X Dedicated PC5 |
| Node Deployment Density | 250-meter strict spacing | Variable (500m – 2000m gantry nodes) | Dense Urban/Highway (150m – 300m poles) |
| Edge Compute Capability | Localized MEC (ARM/0.5 TFLOP Neural Engines) | Centralized regional substations (SRE) | Highly Dense Edge AI Clouds (MEC + Blade Server) |
| Cryptographic Schema | EU C-ITS Architecture (CCMS PKI Infrastructure) | National BSI Kritis Security Architecture | State-Directed SM2/SM3/SM4 Encryption Engine |
| Sovereign Data Loop | Centralized via AlmavivA to National SNIT | Decentralized Federal Autobahn GmbH Hubs | Integrated Ministry of Public Security Platform |
The comparison above highlights a clear trend toward high data density within Southern European infrastructure projects. While Germany focuses on decentralized roadside stations that prioritize traffic alerts over active identification, Italy‘s model uses dense 250-meter node spacing combined with edge processing. This setup matches the aggressive tracking architectures seen in the People’s Republic of China, where infrastructure is designed to feed data directly into centralized monitoring platforms.
This dense deployment strategy allows the system to gather highly detailed kinematic and location profiles. By combining visual data with radio frequency tracking, it eliminates the blind spots common in older traffic networks. The resulting data stream provides a continuous, real-time map of vehicle movements across the entire smart road network.
1.4 Central Platform Integration and National Data Loops
The data collected at the edge is sent back through a high-speed fiber optic backbone to regional control centers managed by ANAS. These regional networks feed directly into a centralized nationwide core. This backend relies on standardized communication formats like DATEX II (CEN/TS 16157), which is the European standard for exchanging data between traffic management centers. This ensures seamless interoperability with law enforcement databases and broader European transport registries, as detailed in the Infrastructure C-ITS Deployment Matrix — C-Roads Platform — June 2026.
Central Upstream Data Distribution
PART A: Local Upstream Consolidation Mechanics
The logical architecture tracks data flowing vertically and horizontally through an escalating consolidation sequence. Raw roadside elements captured inside localized edge nodes are pushed up immediately into centralized Regional Control Hubs. Here, fragmented geographic metrics undergo validation before syncing with the central backbone infrastructure.
Once cleansed, structured vectors land inside the core Central SNIT (Sistema Nazionale Informativo della Transumanza) Database repository. This database acts as the single persistent system of record, holding global telemetry archives across the entire smart road network surface.
PART B: Downstream Egress & Institutional Distribution
From the central SNIT infrastructure, verified telemetry fans out via parallel downstream pathways to external consumers. The left processing arm routes targeted velocity and identity records directly to the Ministry of Interior / SDI (Sistema Direzionale Integrato) interfaces to feed automated enforcement metrics and traffic citation generation routines.
Simultaneously, the right processing arm feeds the EU C-ITS Cross-Border Broker node. This gateway anonymizes traffic data profiles and normalizes them into European cooperative tracking schemas, enabling safe, real-time telemetry exchanges across international boundaries.
This structural link connects everyday road use directly with state enforcement databases. Vehicle data moves instantly from a roadside sensor to the central Sistema Nazionale Informativo della Transavanguardia (SNIT). From there, it is shared directly with the Ministry of the Interior and the national law enforcement database (Sistema Direzionale Integrato – SDI).
This integration creates a real-time data loop. Any divergence from traffic regulations, anomalous movements, or unauthorized highway access triggers an instant notification at the regional level. By removing manual processing delays, the ANAS Smart Road serves as a foundational layer for real-time automated traffic enforcement and continuous behavioral monitoring across the national transport network.
1.5 The 5-Year Analytical Forecast & Horizon Analysis
Over the next five years, this architecture will scale up considerably. As regional networks are linked into a single national system, the volume of tracked data will grow exponentially. The chart below models this trajectory, projecting a sharp increase in tracked highway mileage and data throughput across the European continent.
Dual-Use Exploitation, National Security Overrides, and the Monetization Ecosystem
The architectural layout of the ANAS Smart Road framework goes beyond localized safety modifications or traffic optimization. When evaluated through structural analytic techniques and active regulatory provisions, the infrastructure reveals a multi-layered, dual-use design. This layout is engineered to fulfill three distinct structural purposes: the establishment of national security override vectors, the enforcement of supranational economic boundaries, and the creation of an infrastructure data-monetization ecosystem.
The Three Core Systemic Drivers
• Automated Route Clears
• B2B API Telemetry Sales
• Real-Time Fleet Halts
PART A: Tactical Logistics & Fiscal Backhauls
The macro schematic maps the core systemic drivers steering next-generation smart infrastructure governance, divided into parallel operational tracking pillars. The leftmost track highlights Dual-Use Mobilization vectors, showing how public road networks double as logistical assets. This framework facilitates low-latency monitoring metrics like real-time convoy tracking and rapid automated route clearance protocols for sovereign operations.
Concurrently, the center lane manages the deployment of Sovereign Revenue Loops. This data pipeline translates continuous vehicle position matrices into state financial assets, running automated fleet mileage taxation systems while building out high-margin B2B API telemetry integration suites for third-party commercial consumers.
PART B: Supranational Integration & Remote Enforcement
The third architectural pillar outlines the transition toward centralized Supranational Controls operating at the highway perimeter. By integrating regional nodes with overarching international governance rules, the transport fabric moves past passive monitoring into active perimeter enforcement modes.
This framework handles localized, variable target restriction rules, executing Dynamic Access Restrictions based on rolling emission profiles, registry status, or real-time transit congestion. When critical alerts are generated, the backhaul allows authorized networks to execute remote Real-Time Fleet Halts, locking out unauthorized vehicle operations across whole highway corridors.
1.6 Dual-Use Military Interoperability and Logistics Tracking
The physical deployment of edge nodes along primary strategic corridors—specifically the A90 Grande Raccordo Anulare, the A91 Rome-Fiumicino, and the SS51 di Alemagna—aligns directly with the military transit requirements of the Trans-European Transport Network (TEN-T). Under Regulation (EU) 2024/1679 on Union guidelines for the development of the trans-European transport network – European Parliament and Council – June 2024, transport infrastructure must support dual-use civil-military mobilization requirements.
Dual-Use Priority Control Architecture
PART A: Civil Operations & Ingestion Disruption
The logical scheme charts a dual-use architecture capable of switching from public transport orchestration to defense mobilization models. Under standard operations, the Standard Civil Operation Layer controls the edge loop, feeding traffic metrics into the Real-Time C-ITS Traffic Safety Monitoring component to optimize corridor safety.
However, the system features a hardware-enforced override bus. When an authorized security entity activates the core framework, the standard civil routing pipeline is superseded by high-priority sovereign control routines.
PART B: Sovereign Override & Tactical Logistics
When an escalation event occurs, an authorized command signal sent from the National Security Master Console triggers an immediate system inversion. This hardware override suspends standard monitoring parameters, routing all road telemetry assets into the Continuous Military Logistics Tracking Grid.
This tactical control layer executes optimized asset tracking routines, including real-time convoy trajectory security and automated lane clearing priority loops across monitored highways. Crucially, the system initiates the Suppression of Civil Pseudonym Layers, stripping away rolling cryptographic tokens to unmask persistent vehicle signatures for absolute tracking control.
In scenarios involving national defense or regional treaty activations, the AlmavivA centralized platform and its underlying hardware nodes transition into an active tracking grid for military logistics. The C-V2X PC5 direct sidelink radio interface allows state systems to track heavy vehicle movements, fuel transports, and tactical assets continuously without depending on commercial cellular networks or international satellite positioning systems.
By utilizing the localized sensor fusion capabilities of roadside nodes, the infrastructure can instantly clear transport corridors, prioritize military convoys, and bypass standard civil privacy protections. This design ensures absolute situational awareness for state authorities during critical mobilization events.
1.7 The Sovereign Economic Override and Fleet Interdiction Architecture
The integration of smart road telemetry with central national databases satisfies the long-term enforcement goals outlined in state frameworks, including the Ministry of Infrastructures and Transport DIRECTIVE (EU) 2010/40 PROGRESS REPORT – Italy — June 2021. The underlying purpose of this connectivity is to establish a digital framework for continuous, automated economic enforcement and real-time vehicle restriction.
Automated Economic and Physical Enforcement Loop
PART A: Edge Metrics & Verification Architecture
The workflow tracks an automated loop where physical tracking profiles are tied straight to economic compliance platforms. At the intake line, Edge Telemetry Logging protocols gather dynamic target vectors through the roadside sensor mesh. The node captures precise spatial trajectories, rolling mileage accumulations, and the vehicle’s specific fuel classification layout.
This parsed metadata is bundled and routed to the Central Compliance Matching kernel. The core engine runs audit cross-references, checking the target’s operational profile against authorized environmental zones and associated digital tax accounts to calculate active usage liabilities.
PART B: Sovereign Override & Remote Interventions
The final node demonstrates the transition from passive tracking layers to physical network enforcement. If the evaluation pipeline returns a non-compliant account flag (due to zero-emission perimeter violations, tax evasion, or missing regulatory permits), it trips an immediate conditional sequence inside the Sovereign Override Execution engine.
The trust engine instantly constructs and signs a high-priority command frame. This control token is transmitted downstream via low-latency cellular or infrastructure channels to execute a remote infrastructure halt signal, modifying vehicle operational allowances or restricting passage at upcoming toll gates until compliance parameters are satisfied.
This structural capability enables real-time, automated vehicle restriction based on continuous tracking criteria. As vehicles move through connected zones, the roadside infrastructure reads their exact mileage, real-time emissions data, and route patterns. This data matches directly with state tax accounts and environmental compliance ledgers.
If a vehicle operates outside allowed regional hours, exceeds dynamic carbon limits, or falls behind on distance-based tax payments, the central platform can route a restrictive command back through the C-V2X link. By communicating directly with the vehicle’s On-Board Unit (OBU), the infrastructure can trigger automated restrictions, restrict highway access, or disable vehicle ignition at the next safe stopping point.
1.8 State Monetization Ecosystems and Commercial Telemetry Access
The third primary driver for this high-density infrastructure is the commercialization of transit data. Under the regulatory guidelines of the Smart Road Decree (Ministerial Decree 70/2018), the infrastructure transforms public roads into real-time data generation environments. The gathered metrics are processed through centralized data brokers to fuel B2B monetization loops.
Fiscal Egress & Monetization Architecture
• High-Frequency Dynamic Insurance Pricing
• Predictive Infrastructure Maintenance Sales
• Real-Time Target Congestion Fee Engine
• Automated Corporate Regulatory Penalty Loop
PART A: Commercial Monetization & Downstream Outgest
The primary operational tier traces the conversion of real-time road conditions into monetizable enterprise information assets. The loop begins at the edge with the Raw Roadside Sensor Fusion network, which aggregates multi-modal tracking streams before updating the centralized National SNIT Data Broker matrix.
Once structural tracking metrics map to the central hub, a dedicated distribution pipeline routes payloads to the Aggregated B2B API Outgest module. This gateway serializes high-value telemetry profiles for private sector consumers, powering commercial logistics optimization dashboards, fueling high-frequency insurance risk models, and facilitating predictive highway maintenance analytics sales.
PART B: Sovereign Fiscal Loops & Enforcement Egress
The right downstream processing path maps standard telemetry metrics directly into automated state-level enforcement and revenue mechanisms. As unified tracking streams transit the core SNIT engine, a parallel branch is split into the Sovereign Revenue Generation layer to evaluate current network load parameters.
The underlying accounting engine converts spatial vehicle coordinates into active micro-transaction streams. The system calculates real-time dynamic section tolls and issues environmental congestion charges instantly. Simultaneously, compliance checking monitors freight and asset behaviors, triggering automated corporate penalties for target profiles that operate outside regulatory guidelines.
This architecture creates a continuous revenue generation engine for state concessionaires. Real-time driving profiles, acceleration variables, localized route selections, and vehicle component conditions are bundled into commercial data feeds.
These data products are sold directly to corporate logistics companies, commercial fleet operators, and high-frequency auto insurance providers through secure application programming interfaces (APIs). By turning continuous driver telemetry into a marketable asset class, the infrastructure converts public highway segments into profitable data collection grids under the guise of public utility.
1.9 Global Comparison: Strategic Architecture Models
| Functional Domain | European Union (TEN-T Architecture) | People’s Republic of China (MIIT Grid) | United States (USDOT V2X Platform) |
| Primary Dual-Use Mandate | Civil-Military mobility integration via Regulation 2024/1679 | State security mobilization and defense integration | Fragmented dual-use civil evacuation assistance |
| Sovereign Override Method | Cryptographic token suspension via CCMS PKI | Direct central command network intervention | Localized law enforcement radio override attempts |
| Data Monetization Model | Concessionaire B2B data broker networks | State-directed enterprise data loops | Fragmented private connected vehicle data markets |
| Enforcement Automation | Real-time cross-border compliance routing | Centralized social and operational indexing | Post-event citation distribution networks |
This comparative layout shows a clear global trend toward the structural use of transport infrastructure for state security and economic enforcement. While the United States operates within a fragmented market model, the European Union has established a legally integrated framework that combines dual-use military requirements with automated corporate data pipelines. This positions modern smart roads as foundational tools for long-term state oversight and revenue generation.
1.10 5-Year Structural Risk Projections & Network Expansion
Over the next five years, the transition toward automated data monetization and sovereign control infrastructure will accelerate alongside the wider roll-out of software-defined vehicles. The chart below tracks this shift, modeling the growth of active data monetization channels and state override capabilities across connected transit routes.



{kind=link}