










 Extract (6-MSITC) in Healthy Older Adults")
: An In-Depth Exploration into its Thermogenic Role and Social Significance")



In the current issue of Science Robotics, researchers from Istituto Italiano di Tecnologia (IIT- Italian Institute of Technology) and Centro Protesi INAIL in Italy reported on their ability to replicate the key biological properties of the human hand: natural synergistic and adaptable movement, biomimetic levels of force and speed, high anthropomorphism and grasp robustness.
Developed by a collaborative of researchers, orthopaedists, industrial designers and patients, the prosthetic hand called Hannes is able to restore over 90% of functionality to people with upper-limb amputations.
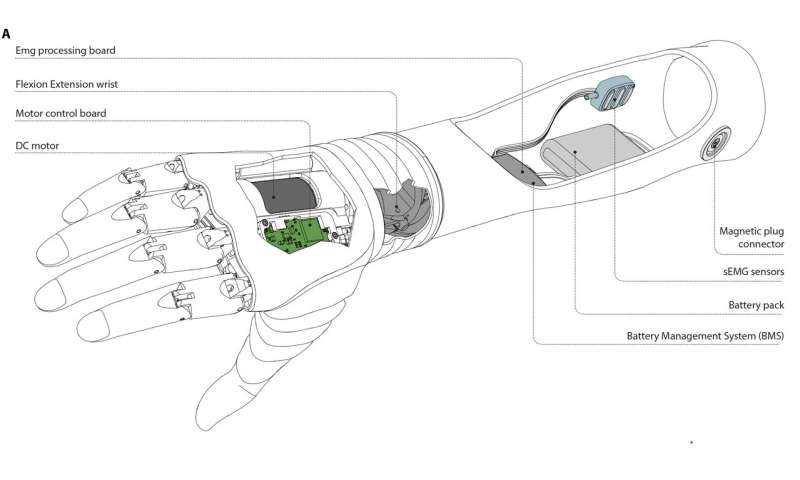
Hannes is an anthropomorphic, poly-articulated upper limb prosthetic system including hand and wrist, whose main characteristics are softness and the ability to dynamically adapt to the shape of objects to grasp.
It is uniquely similar to a human hand, and being developed directly with patients, has immediate practical use.
To evaluate the effectiveness and usability of Hannes, pilot trials on amputees were performed at Centro Protesi Inail, and the researchers found that after a training period of less than one week, patients could autonomously use Hannes to perform activities of daily living.
The prosthesis is a myoelectric system that can be worn all day, and is adjustable to a variety of upper limb impairments.
An array of surface electromyographic sensors placed within a custom socket detects the activity of the residual limb muscles in the lower or higher part of the arm, which are actively contracted by the user to perform multiple movements.
Moreover, through specially developed software and a Bluetooth connection, it is possible to customize the operating parameters of the hand, such as the precision and speed of movements, to ensure the most optimized experience for each user.
Hannes hand has been tested for durability and robustness in a setting that simulated more than one year of use by a so-called “pro-user,” lasting almost 500,000 life cycles.
The robotic hand Hannes is developed in Italy at Istituto Italiano di Tecnologia and Centro Protesi INAIL. Hannes is able to replicate the key biological properties of the human hand and is able to restore over 90% of functionality to people with upper-limb amputations. Credit: IIT-Inail
The true intelligence of Hannes lies in the mechanical design, which is completely unique in its market sector, and it gives the prosthesis the versatility and the movement of a natural hand.
The underlying mechanism of the hand is a mechanical differential system that allows Hannes to adapt to the object being grasped by using just a single motor. This also dramatically enhances performance due to its efficiency.
It also corresponds with the 50th percentile of human hand size. Hannes is provided in two sizes, 7 ¾ and 8 ¼, for right and left hand replacement, and is suitable for female and male subjects. Its weight is 450 grams.
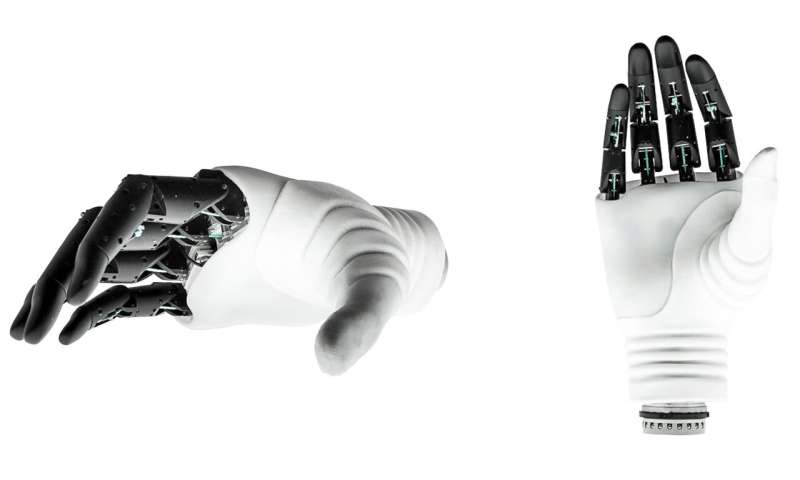

Fingers can flex and be positioned in a natural manner, even at rest. In particular, the thumb can be oriented in three positions to replicate a wide variety of grips, including a fine grip for picking up small objects, a lateral grip to grasp thin objects, and a power grip capable of grasping and moving even heavy loads.
The overall grasp is efficient, robust against external conditions and natural.
The system also permits the pronation and supination of the wrist (“key turning movement”), allowing grasps in different orientations without relying on harmful patient compensation.
Video of an individual performing everyday tasks while wearing Hannes. Credit: Laffranchi et al., Sci. Robot. 5, eabb0467 (2020)
Hannes can perform a full closed grasp in less than one second, and can exert a maximum grasp force of 150N, which is well beyond other commercial and research poly-articulated hands. It has an autonomy of a whole day of standard use (battery life of one day: 12V power supply for a battery capacity of 1300 mAh).
Video of patients with lower-arm amputations performing clinical tests with Hannes. Credit: Laffranchi et al., Sci. Robot. 5, eabb0467 (2020)
The researchers conducted experiments to validate Hannes’s performance and the human-likeness of its grasping behavior and demonstrated improved performance compared with existing research and other commercial devices.
Biomimetics, a present trend in many scientific fields, has been known and used by engineers for many years [1,2]. This term stands for imitating natural elements, techniques, and systems for the purpose of solving many human problems [3,4].
Natural solutions, improved by thousands of years of evolution, were the inspiration for many inventions, where the most known, considered by Leonardo da Vinci and built by the Wright brothers, was the first aeroplane, of which the wings’ shape was based on that of birds [3].
There are many examples of such solutions: the Schmitt trigger, inspired by squids’ neural impulse propagation, the Velcro mechanism, observed on woodland burs sticking onto dog fur, trains, form mimicking the kingfisher diving into water, or modern animal-move/shape robots [5–12].
The most important solution, from this article’s perspective, is contained in ourselves.
The role of biomimicking the human hand, the most dextrous tool ever known, acquired special significance during the Second World War, when the number of amputees suddenly increased [13,14].
To recover their functionality, simple nonelectrical prostheses were applied that allowed to perform a pinch grasp. Their mechanical construction was based on a hook attached to the wrist and a single wire linked between it and the back. Flexion of the arm pulled the wire, thereby moving the hook [15–17].
Subsequently, electrical human-shaped robotic hands started to appear , but this was in 1967, when such hands became commercially available and it was not until 1977 that they began to have medical importance [18].
Since then, the ongoing growth of automation and space exploration induced a rise of new applications for artificial hands: teleoperations. Hazardous, such as radioactive, chemical, or biological, environments, require to follow strict safety procedures, and a human presence in those areas is best avoided.
This also applies to extravehicular activity (EVA) [19–22]. To allow an operator to work with a mobile robotic hand, it should have a more humanlike range of moves, which means that both
power and a precise grasp must be obtained. As proof, [23] showed that only 29 out of the 195 EVA tools could be used with a single hand. To that effect, we make distinction between a holding and an actuating hand. Dexterity improvement should go together with a natural shape and size for better visual feedback and inglove operations; as [24] rightly said, “a human will find it easier to control a robot hand with functions like their own hand”.
The end of the 20th and 21st centuries brought big technological progress.
This applied to new materials, processing abilities, designing techniques, and the miniaturization of existing devices and methods [25–27]. New tactile sensors not only reduced dimensions, but are also elastic, which makes them easier to place [28–30], similarly to DC motors where, instead of the old ones, high-power density devices are used. Furthermore, artificial muscles like shape memory alloys (SMAs), twisted and coiled polymers (TCP), dielectric elastomers (DEA), and others are gaining popularity [31–35].
Whole actuators lead to the possibility of installing more of them in the palm or forehand, therefore increasing the number of degrees of freedom (DOF) [36–38]. According to the material and fabrication techniques, 3D printing is indisputably the most important innovation, as it makes prototyping and replacing parts much faster and cheaper [39,40].
Nowadays, except for the well-known solutions described above, the importance of humanoid robots is increasing [20,41,42]. The upcoming exploration of Mars will need the help of robots with dextrous skills to build a base [43,44]. However, Earth is a place where such robots would be the most appropriable.
Demographic analysis, carried by Japan, showed that, by the middle of the 21st century, about 30% of Japan’s population will be over the age of 65. Simultaneously, a decreasing number of births will cause a huge demand for robots that can coexist with humans and take care of them [45–47].
That and other arguments show a promising future for artificial hands, but there is still a long way to go to design a device that could compete with a human hand.
The aim of this article is to review artificial hands developed by scientific research groups since the 1980s, as well as to discuss novel technology. The paper approaches the issue of mechanical construction through actuation and transmission methods, ending on applied sensory technology. Analysis of over 80 devices provides trends that robotic hands would follow in the near future.
In addition, it must be noted that the analyzed devices were searched in all available scientific databases with the phrases “artificial hand” and “robotic hand”. Moreover, due to the large amount of data, the table with a complete comparison of all mentioned terms is included in an external repository [48].
Human-Hand Overview and Evaluation
Natural Principles
In order to better understand hand structure and purpose, and to introduce the nomenclature used in this paper, the main body systems are described below.
The human hand consists of five fingers: thumb, index, middle, ring and little, which are numbered from 1 to 5, respectively. Its skeletal system is composed of 27 bones, where eight are carpals and five metacarpals. Digits 2 to 5 have three bones each, called the phalanges: proximal, middle, and distal.
The thumb differs from the other fingers and has only two bones, the proximal and the distal (Figure 1). Ligaments between the appropriate bones create joints that allow them to move in particular directions and ranges.
Three main joint types can be distinguished: proximal interphalangeal (PIP), distal interphalangeal (DIP), and interphalangeal (IP) joints are simple hinge joints, which means that they can move in one axis. Another type is the condyloid, which forms metacarpophalangeal (MCP) joints and allows biaxial movement, i.e., flexion or extension, and adduction or abduction.
The third and most important is the saddle joint of the thumb, the carpometacarpal (CMC). Due to specific construction, this joint provides triplane movement, that is, flexion or extension, abduction or adduction, and rotation. It should be noted that the CMC joint is defined as a joint with two degrees of freedom because there is no possibility to independently execute a third move. Nevertheless, as a result of these three actions, the human thumb can perform opposition, which makes it unique [49,50].
The contentious issue of hand kinematics is the opposition of the little finger. Levangie in [51] described the CMC joints of Fingers 2–5 as follows: the second and third may be considered as having 0 DOF, the fourth is the plane synovial joint with 1 DOF (flexion or extension), and the fifth is a 2 DOF saddle joint that permits flexion, extension, some abduction, adduction, and limited opposition.
On the contrary, human-hand kinematics in [52,53] included CMC joints of the ring and the little finger as two biaxial joints. As settlement of this dispute is not in the aims of this article, the overall term of
“little-finger opposition” is used in the following sections.

(b) muscle-sliding-filament theory (based on figure from basicphysiology.com).
Muscles are natural one-way actuators, so they mostly work in opposing pairs. A basic unit of muscle fiber is a sarcomere. It consists of thin (actin) and thick (myosin) filaments. The mechanism of contracting is described by muscle-sliding-filament theory where, generally, thick filaments slide past thin ones.
As a result, a muscle shortens and its volume simultaneously increases. More than 30 hand muscles could be classified by their location; those in the forearm respond to power grasps, and those in the hand to precise grasps and manipulation [54,55].
Motion transmission is carried by the tendon system. Elastic connective tissue, connected between muscles and bones, slides in sheaths that not only prevent it from rubbing, but also keep it in the right place close to the digits. There are simple, direct tendon connections as well as complex ones, i.e., the extensor mechanism, otherwise called the tendon network.
The structure of the extensor mechanism combines forces from such muscles as interosseous, lumbrical, and extensor digitorum that, depending on the sequence, allow executing different finger moves [49,56].
The nervous system is the control unit of an organism that transmits signals to and from different parts of the body. As there is no need to explain the sensing-mechanism principles of upper limbs, the most significant are listed as follows: tension of muscle fiber, muscle-contraction velocity, and touch detection of the skin (pressure, slip, vibration, temperature, and pain).
Furthermore, processing of these data happens in conjunction with vision, our dominant sense, and proprioceptors provide information about joint angle and body-part orientation [55,57–60].
There are many strategies for determining hand mobility, and the first works on it assumed such factors as parts of the hand used in grip, shape of the object, final position, and geometry [19,61].
However, in 1956, Napier divided tasks into prehensile (an object is seized or held) and nonprehensile (passive activity of hand like lifting or holding an object) actions [61]. He also considered that grasp stability is required for proper hand operations. As this could be achieved by holding an object
between fingers and palm, or fingers and opposing thumb, grasps were classified as power or precise. The above solutions were used and published by Cutkosky as grasp taxonomy where the first level of the tree is divided into precise and power grasp, and then branches out into grasps that depend on object geometry [62].
This classification and many others were incorporated into the recent work of Feix et al., which provides many more details of grasp properties (Figure 2).

Taxonomy has a total number of 33 grasps that are split into the following aspects:
- power, intermediate, and precision grasp;
- type of thumb opposition: palm, pad, and side;
- thumb adduction or abduction; and
- virtual fingers, number of forces applied in different directions.
Artificial-Hand Examination
In order to compare a robotic hand with that of a human, comparison methods must be considered. Commonly used by most researchers is an investigation of how many grasps, from both Cutkosky and Feix taxonomy, the device is able to perform. More complex examination, in prosthetics compliance, is the Southampton Hand Assessment Procedure (SHAP) test [64], where the dynamics of the whole prosthesis system is tested. It consists of two tasks, where first an amputee has to manipulate six abstract objects.
The second part includes 14 activities of daily living (ADL). If the user is unable to complete a task in 100 s, it is considered a failure. Another was introduced by Kapandji [65] to examine thumb-opposition abilities by simply touching various parts of the hand with the thumb tip.
In opposition to the methods mentioned above that allow a comparison of a robotic hand with a human hand, Biagiotti et al. [66] proposed an approach to contrast devices with defined indices.
The anthropomorphic level takes into account three features, kinematics, contact surfaces, and size. It also defines the potential dexterity index of a given mechanical construction; hence, fingertip or whole-hand grasp and manipulation are rated. Moreover, the index of the sensory system was considered; thus, angle, tactility, force or tension, and additional sensors were indicated.
Sensors
Humans without their senses could be compared to the first automatic machine that could execute some work but did not respond to any information from the environment. This led to evident problems, where the most important and dangerous were self-damage or injury to someone else. Since the purpose of artificial hands is to imitate humans’ most advanced abilities, it must be considered with the appropriate senses–sensors.
A basic type of feedback is the angle position that may relate to both joint and actuator position. Since servomotor electronic systems provide angular information, and DC motors can easily be supplemented with encoders as well as pneumatic actuators with pressure gauges/sensors [89,110,136], more challenging is to apply an appropriate aperture in the finger joints. Instead of potentiometers [82,115], which introduce unwanted mechanical correlation and friction, contactless Hall-effect sensors with high resolution and good repeatability are a better solution [121,138].
The working principle is based on a diametrically magnetized magnet placed concentrically in a joint that is detected by a sensor. Contrary to commonly used circular magnets, ellipsoidal magnets are used in Robonaut Hand 2 for that characteristic to be more linear [168]. Strain gauges and bend sensors are rarely used due to problematic installation, nonlinear characteristics, and low resolution [80,108].
A robotic hand with a closed position loop is able to perform all of the possible gestures, limited only by joint range. This situation changes diametrically when external force is applied either from a manipulated object or finger collision. To prevent potential damage, force, torque, and tension data-collection methods are applied.
The conventional technique assumes estimating torque by measuring the actuator circuit current, used in [73] and [90], which is well-known and developed, but a number of factors could disturb the mathematical model. One of them was included in the RoboRay Hand, so the control algorithm compensated for friction occurring in the entire construction [137].
In opposition to angular positioning, a force tasks implementation of strain gauges in various forms. For example, in [38], the tendon slid over a pulley that was placed on the strain gauge so that tension was checked with joint torques of up to 130 N; in Gifu Hand II, a six-axis force sensor was included in the fingertips, which was based on gauges [36] and many others [23,139]. Once more, Robonaut Hand 2 presented an original solution where it was observed that conduit (covering tendon) compressive force was equal to tendon tension within an error of 5%–10% [168].
Going forward, angular-position disparity with spring displacement [82,111] and differences in actuator-chamber pressure [93] were presented, but the most innovative method involved photoactive elements [115]. The authors in [178] constructed a miniature tension sensor consisting of a fork shape that had an LED diode and phototransistor on the gap sides.
An elastic frame covered the whole part, while a screen attached to the inner side of frame interrupted the light beam. When the tendon pulled the elastic surface, the amount of detected light increased, hence the voltage changed. Extensive tests confirmed that sensors placed in fingertips can withstand forces up to 200 N with very linear characteristic and generally no histeresis.
The missing factor separating from inhand manipulation as well as accurate grasp parameters is tactile prehension of the human hand. The major challenge is to mimic human-skin mechanoreceptors responsible for interaction with the environment and providing sophisticated prehensile information. While natural mechanisms allow to detect such phenomena as vibration, touch, and pressure, the state of the art in robotics was found to be at a phase of introducing thin elastic sensors.
Despite simple contact sensors [45,77,121] of which the function, except for the palm and side forces, could be replaced by solutions described above, there are more efficient: force-sensitive resistors. They are relatively flexible sheaths built from conductive polymer that changes resistance due to external force or pressure.
Although their architecture only allows to achieve single-force measurement, they are frequently implemented on fingers and digits [72,89,127,138]. A more developed 3 × 3 array sensor appeared
in [75], as well as a 4 × 4 and 0.1 mm thick tactile sensor delivered by Tekscan Inc. [100]. These can not compete with the Gifu Hand II, where the total number of 624 detecting points were applied for the whole construction [36].
Worth noting is Quantum Tunnelling Composite (QTC) technology, of which products are composites of metals and nonconductive polymers that, due to external force/pressure, change their resistance [60]. Sensors used in the Shadow hand provide 34 independent measuring points on each fingertip [131].
For better research and wide technology description, it is worth to check [179] that is fully dedicated to robotic-hand-sensor technology.
High potential referring to sophisticated tactile-sensing methods lies in rapidly expanding material technology that affects many science fields, i.e., robotics. To better illustrate this phenomenon, searches in Google Scholar with phrases like “tactile sensor” and “artificial skin” were classified by the appropriate time period in Figure 7.

This clearly shows that the number of publications and therefore available solutions is increasing. Consequently, if the state of art and the above trends are taken into account, it could be said that future devices will not only provide high-resolution measurements, surface recognition, and versatility, but they may also deliver information about potential damage (pain) and even temperature.
reference link : doi:10.3390/app9194090
More information: M. Laffranchi el al., The Hannes hand prosthesis replicates the key biological properties of the human hand, Science Robotics (2020). DOI: 10.1126/scirobotics.abb0467
A more human prosthetic hand, Science Robotics (2020). robotics.sciencemag.org/lookup … /scirobotics.abd9341



{kind=link}