








")


 Extract (6-MSITC) in Healthy Older Adults")
: An In-Depth Exploration into its Thermogenic Role and Social Significance")



A promising concept within this landscape is the utilization of UAV swarms, which involves multiple autonomous agents collaborating to achieve common objectives. In this article, we delve into the expanding role of UAV swarms, exploring their potential applications, the challenges of control, and the prospects of integrating human operators into the swarm management process.
Background
The proliferation of UAVs in the military realm has redefined reconnaissance and surveillance, reducing risks to human personnel. Simultaneously, the civilian sector has witnessed a surge in UAV adoption, leading to a substantial projected market growth from $13.9 billion in 2021 to a staggering $40.7 billion by 2026. This unprecedented rise in UAV interest has accelerated technological progress, enabling diverse and innovative UAV configurations.
UAVs, or drones, are characterized as autonomous or remotely controlled military aircraft equipped with various sensors, target designators, offensive ordnance, and communication devices. Their unique design, unburdened by human crew and life-support systems, grants UAVs superior range, endurance, and efficiency. In common parlance, UAVs are often referred to as “drones,” with “UAV” primarily used in military contexts.
The military has widely embraced UAVs, employing single UAV systems for intelligence gathering while minimizing human risk. Notably, during the Armenia-Azerbaijan conflict, UAVs played a pivotal role in enhancing Azerbaijan’s strategic advantage. Recent advancements in artificial intelligence and robotics have spurred increased automation in UAV systems, rendering them more efficient and versatile.
Apart from increased automation, structuring UAVs as swarms offers significant advantages. The concept of UAV swarms has been discussed for over two decades, and it recently saw its first practical application in the Israeli defense forces’ AI-driven UAV swarm during the summer of 2021.
UAV swarms offer robustness, flexibility, and scalability. They exhibit robustness by maintaining functionality even if individual agents are lost, with minimal efficiency compromise. Their flexibility stems from adaptability to diverse scenarios, including coverage of large areas and division into sub-swarms for parallel task execution.
Furthermore, swarm homogeneity enables agents to switch objectives as needed, and scalability is achieved through linear complexity control algorithms, avoiding resource bottlenecks as the swarm size grows.
However, as systems become more complex, such as UAV swarms, single human operator control becomes increasingly challenging. Balancing high levels of automation with operator control becomes a central concern. Operators desire a degree of control while benefiting from automation.
This dilemma was evident in Miller and Funk’s development of the Rotorcraft Pilot’s Associate Cockpit Information Manager, where maintaining operator control was a top priority. Operators must remain in charge of task allocation and information presentation. Balancing automation and operator control remains a key challenge in complex systems.
To address this challenge, the UAV swarm system can be divided into three components: the operator, drone, and swarm. These components form a hierarchical and parallel relationship, dependent on the mission’s context. In the hierarchical structure, the operator oversees high-level control, understanding the mission’s overarching objectives and tactical execution. The operator plays a supervisory role, leveraging human cognitive abilities effectively.
The swarm consists of all UAVs in the system, defined as a group of five or more individual, self-organized, homogeneous UAVs that perform missions via local interactions under a decentralized control architecture. The exact number of agents is not critical, as long as a single operator cannot control them unassisted. The system should accommodate an arbitrary number of drones.
The drone represents the physical hardware and software responsible for individual agent functionality. Drones manage tasks such as flight corrections, sensor adjustments, obstacle detection, and battery life management. This article focuses on small, generic drones equipped with common sensors, including cameras, gyroscopes, and short- and long-distance communication devices.
This master thesis collaboration with the Swedish Defense Research Agency (Totalförsvarets Forskningsinstitut or FOI) underscores the growing importance of UAV and swarm technologies in the military context. The extensive use of UAVs in both military and civilian domains contrasts with the limited use of autonomous UAV swarms in military operations.
The Promise and Potential of UAV Swarms
UAV swarms have emerged as a compelling paradigm within the UAV ecosystem, offering an array of benefits and potential applications. The unique characteristics and advantages of UAV swarms make them an enticing prospect for various domains, ranging from military reconnaissance to civilian applications.
Enhanced Robustness
The resilience of UAV swarms enables them to sustain efficiency and effectiveness in the face of adversity. They can adapt to unexpected challenges, such as equipment failures, environmental hazards, or adversarial interference. This resilience, combined with the ability to self-organize and redistribute tasks, empowers UAV swarms to maintain mission integrity under challenging circumstances.
Unparalleled Flexibility
Flexibility is another key asset of UAV swarms, offering them the capacity to tailor their approach to diverse situations. Single UAV systems often struggle to address rapidly changing scenarios or simultaneously cover multiple areas. In contrast, swarms can adjust their composition and distribution to address dynamic mission requirements.
UAV swarms can exhibit multi-faceted flexibility, including:
- Mission Coverage: Swarms can efficiently cover larger areas, making them well-suited for reconnaissance missions that span extensive geographical regions. This capacity is particularly valuable in military operations, as it reduces the need for deploying multiple single UAV systems.
- Parallel Task Execution: Swarms can divide into sub-swarms, allowing parallel execution of tasks at different locations. This parallelism enhances mission efficiency and reduces the time required to gather critical intelligence.
- Objective Switching: The homogeneous nature of swarm agents enables them to switch objectives seamlessly. If one agent becomes incapacitated or detects a more critical target, the swarm can adapt by reallocating tasks among its members.
Scalability and Efficiency
Scalability is a fundamental strength of UAV swarms, as they can grow or shrink in size based on mission requirements. The scalability of a swarm is achieved through control algorithms that maintain linear complexity, ensuring that resource demands do not increase disproportionately with the number of drones in the swarm.
This scalability is pivotal for both military and civilian applications. In military contexts, swarms can be deployed in larger numbers to enhance reconnaissance capabilities or overwhelm enemy defenses. In the civilian sector, scalability allows for the efficient deployment of UAV swarms in various industries, such as agriculture, environmental monitoring, and disaster response.
The efficiency of UAV swarms also extends to their collaborative nature. Agents in a swarm can share data and insights, enhancing overall mission performance. This collective intelligence can lead to more informed decision-making and a higher likelihood of mission success.
The Challenge of Balancing Automation and Operator Control
As the complexity of UAV systems increases, the challenge of balancing automation with operator control becomes evident. While high levels of automation can reduce operator workload, they also introduce unpredictability into the system. Operators prefer to retain a degree of control to ensure mission success and adaptability to unforeseen circumstances.
Miller and Funk’s research on cockpit design for Rotorcraft Pilot’s Associate Cockpit Information Manager underscores the operator’s desire to maintain control over task allocation and information presentation. Operators play a critical role in mission planning, strategy, and decision-making, necessitating a human-machine synergy that optimizes both operator capabilities and automation.
The key question is how to empower operators to remain in control of complex systems with high levels of automation. Addressing this challenge requires a holistic approach that considers the unique strengths of both human operators and autonomous systems. In the context of UAV swarms, this challenge becomes even more pressing, as a single operator must manage multiple agents within the swarm.
Integrating Human Operators into UAV Swarm Control
To address the challenge of integrating human operators into UAV swarm control, it is essential to create a framework that leverages the cognitive and tactical abilities of operators while accommodating the benefits of automation. This framework should ensure that operators can effectively oversee and guide the swarm, even as automation plays a significant role in mission execution.
The Operator’s Role
In the hierarchical structure of UAV swarm control, the operator assumes the role of high-level control and supervision. Operators possess a deep understanding of the mission’s overarching objectives and tactical execution. They are akin to mission supervisors, ensuring that the swarm aligns with the mission’s goals and adapts to changing circumstances as needed.
Swarm Autonomy
The autonomous nature of the swarm is a pivotal component of effective UAV swarm control. The swarm’s ability to self-organize, collaborate, and adapt to local interactions under a decentralized control architecture empowers it to execute missions with efficiency and resilience. Swarm autonomy allows it to respond to dynamic mission conditions, such as environmental changes or unexpected obstacles.
Behavior Trees: An Innovative Approach
One promising approach to controlling UAV swarms is the utilization of behavior trees. Behavior trees are hierarchical structures that define the decision-making processes of autonomous agents. They offer a systematic and intuitive way to manage the actions of agents within a swarm, providing operators with a high-level description of how the swarm functions.
Testing Behavior Tree Control
In the pursuit of effective UAV swarm control, behavior trees are subjected to rigorous testing and evaluation through simulations. The creation of three simulations allows researchers to assess the strengths and weaknesses of the behavior tree approach. This evaluation serves as a crucial step in understanding the feasibility of behavior trees as a method for managing UAV swarms.
Future Possibilities
The future of UAV swarm control holds exciting possibilities. As technology continues to evolve, the integration of advanced AI and machine learning algorithms will enhance the capabilities of UAV swarms. These advancements will further alleviate operator workload and improve the predictability of swarm behavior.
Human-machine interfaces will play a pivotal role in streamlining operator interaction with UAV swarms. Advanced user interfaces, incorporating augmented reality, machine learning, and natural language processing, will enable operators to seamlessly interact with the swarm, issue commands, and monitor mission progress.
In the civilian sector, the potential applications of UAV swarms are diverse. From precision agriculture to disaster response and environmental monitoring, swarms offer cost-effective solutions to complex challenges. UAV swarm technology will continue to expand and refine its role in both military and civilian contexts, making it a compelling field for further exploration.
Previous Work in Swarm Control
Playbook Approach
The playbook approach, introduced by Miller, Pelican, and Goldman [8], serves as a foundational concept for controlling autonomous systems and human-autonomy interaction. This approach draws inspiration from American football playbooks, where teams have predefined plays that can be easily communicated and executed during games. The central idea is to provide operators with flexible control over complex systems, allowing them to adjust the degree of automation based on various factors such as time constraints, workload, and mission criticality.
Components of the Playbook Approach
The playbook approach consists of three main components:
Shared Task Model: The shared task model is a crucial component responsible for managing plans that operators create. It is structured in a way that is both interpretable by humans and usable by knowledge-based planning systems. The task model is organized through function decomposition, breaking down tasks into alternative methods for achieving goals, including primitive actions. It should reflect the operator’s thought process for better understandability.
Playbook Graphical User Interface (GUI): The Playbook GUI serves as the interface through which human operators communicate tasking instructions. This interface allows operators to interact directly with the task model and fulfills specific requirements, as outlined by Miller et al. [8]:
- The plays in the playbook should be familiar to well-trained operators.
- The general playbook “template” can be instantiated to create mission-specific plans.
- Operators can choose plays at different hierarchical levels, delegating lower-level decisions to the mission analysis component.
- True mixed initiative planning should be possible, enabling operators to require or prohibit specific plays.
Mission Analysis Component: The mission analysis component integrates project planning with human tasking. Its primary function is to operate plans provided by the Playbook GUI, assess the feasibility of the operator’s plan, verify constraints, and automatically generate candidate completions of partial mission plans, adhering to the operator’s requirements and prohibitions.
Challenges in Tasking Interfaces
Miller et al. [8] identified three key challenges in designing effective tasking interfaces:
- Developing a Shared Vocabulary: This involves creating a common language through which operators can pose tasks to the automation, and the automation can communicate its intended approach for task execution flexibly.
- Incorporating Sufficient Knowledge: The tasking interface must include a substantial amount of knowledge to enable intelligent decision-making within the constraints set by the user.
- Creating User-Friendly Interfaces: Interfaces should allow users to easily inspect and manipulate the tasking vocabulary for task creation and review.
The tasking interface should also facilitate the integration of specialized tools, enabling the addition of new functionalities during development to provide task-sensitive and intelligent behaviors.
Mission-based Architecture for Swarm Composability
The playbook approach laid the foundation for further developments, including the Mission-based Architecture for Swarm Composability (MASC) introduced by K. Giles and K. Giammarco [7]. This framework focuses on designing swarm behaviors based on common U.S. Navy missions and tactics.
MASC Framework Levels
The MASC framework encompasses five hierarchical levels:
- Swarm Mission: This level defines the overarching purpose and assignment of the swarm. It serves as the highest level of control in MASC.
- Swarm Phase: Each mission is divided into distinct phases, including Preflight, Ingress, Onstation, Egress, and Postflight.
- Swarm Tactic: Tactics define the structure and employment of agents within the swarm to achieve specific tasks.
- Swarm Play: A swarm play describes the actual maneuvers of the swarm as a group of agents.
- Swarm Algorithms: These are instructions that the swarm control software employs to accomplish recurring tasks.

Figure : The MASC framework with its five hierarchical levels. Taken from “Mission-based Architecture for Swarm Composability”
MASC Application
The MASC framework was tested by K. Giles and K. Giammarco by applying it to a fictional maritime interdiction operation, where the U.S. Navy supports the Indonesian Navy in combating illegal shipping in the Sunda Strait. The framework allows for the modular and composable construction of swarm missions, tactics, plays, and algorithms, providing operators with the flexibility to adapt to various mission requirements.
Operator Evaluation
Well-trained fleet operators were involved in the evaluation of the MASC architecture. They were tasked with creating a swarm mission plan using the framework and subsequently provided feedback. The evaluation focused on four key criteria:
- Support for a Variety of Missions: The architecture should support a wide range of missions, including air-to-air, maritime, and overland operations.
- Modularity: The architecture should be modular, allowing for the rearrangement and reuse of tactics to support different missions and conditions.
- Composability: The architecture should enable the assembly of simulation components into valid systems to meet specific user requirements.
- Intuitiveness: Fleet aviators with operational experience should find it intuitive to construct swarm mission plans.
The MASC framework’s strength lies in its hierarchical approach, which empowers operators to create swarm missions from high-level goals down to detailed tactics, plays, and algorithms, providing adaptability and flexibility in swarm control.
Challenges and Implications
Human-Autonomy Teaming
Swarm robotics is an emerging field inspired by the collective behaviors observed in nature, such as social insects and flocks of birds. In this context, the interaction between human operators and autonomous robotic swarms presents a fascinating area of research known as “Human-Autonomy Teaming.”
This concept recognizes the vital role of humans in orchestrating and collaborating with robotic swarms and aims to address a series of significant challenges. In this article, we delve into the key challenges identified by the NATO task group HFM-247 under the framework of Human-Autonomy Teaming.
Human-Autonomy Communication
A cornerstone of effective human-autonomy teaming is seamless communication between humans and intelligent machines. This communication interface should be intuitive, enabling operators to leverage their creative cognitive abilities while ensuring that autonomous systems can comprehend and act on the inputs provided.
Operators need to convey status updates, introduce new information into the system, and raise matters for attention. Furthermore, a common language, ontology, or symbolic logic should facilitate the sharing of information among agents, given the diversity in their backgrounds, knowledge, and experiences.
Task Allocation and Dynamic Function Allocation
Clarity in roles and responsibilities is essential for both human and autonomous agents. The system should maintain awareness of the functions currently being performed and those that need attention. An especially challenging aspect is dynamic allocation of functions. This involves considering the current workload of the operator, the capabilities of team members, and the allocation of related tasks to ensure the overall team’s performance is optimized.
Team Decision Making
Effective team decision making in human-autonomy teams is multifaceted. Decisions must be classified based on their suitability for autonomous agents, team decision-making, or human operator intervention. The establishment of an error checking strategy is crucial, allowing both humans and autonomous agents to monitor each other’s decision-making processes and raise concerns when necessary.
Training for Effective Teaming
A psychological challenge in human-autonomy teaming pertains to how teams can be trained to harness the complementary strengths of human and autonomous agents. There are two scenarios to consider: teams where autonomous agents are designed to learn and those where they are not.
Effective teams that learn and adapt exhibit three characteristics. These include teams designed with learning as a priority, teams led by individuals framing challenges to motivate learning, and teams in environments fostering communication and innovation.
Trust between Humans and Autonomous Systems
Trust is a critical factor in human-autonomy teaming. Striking the right balance between underestimating or overestimating the capabilities of autonomous systems can be challenging. A lack of trust can lead to disuse, while misplaced trust may result in misuse. While this challenge leans toward psychological considerations, it is essential to address for the successful integration of human-autonomy teams.
Evaluation Metrics
Finally, a comprehensive and objective effectiveness metric is needed to assess the quality of different human-autonomy teaming instantiations. This metric will provide a basis for comparing and improving various approaches and ensuring that human-autonomy teams are performing at their best.
Evolving Behavior Trees for Swarm Robotics
Swarm robotics, inspired by the collective behaviors of social animals and birds, presents unique challenges when designing controllers to mimic these behaviors. Evolutionary methods have become a common approach for generating controllers, but this approach is not without its challenges. Researchers, such as S. Jones and his colleagues, have identified specific problems associated with these controllers, including bootstrapping and readability.
Bootstrapping Problem
The bootstrapping problem arises from the difficulty in devising fitness functions that lead to complex and desired swarm behaviors. A promising solution involves using hierarchical modular approaches, such as AutiMoDe, which utilizes Probabilistic Finite State Machines to manage controller complexity effectively.
Readability of Controllers
The readability of controllers is another challenge in swarm robotics. To address this, researchers have proposed the use of behavior trees as a structured representation for evolving controllers. Behavior trees offer higher human readability and modularity, making them an interesting structure for evolving complex swarm behaviors. These trees provide a more intuitive way for humans to understand and fine-tune the behaviors of the swarm.
Human Comprehension of Collective Behavior
S. Jones and his team believe that the increased human readability of evolved behavior trees, compared to other forms of evolved controllers, enhances the understanding of how collective behavior emerges from the interactions of individual agents. This improved comprehension is essential for enabling humans to effectively work with and supervise robotic swarms.
Supervisory Control of Robot Swarms
As the interest in swarm robotics continues to grow, researchers are exploring mechanisms that allow human supervisors to control swarms effectively while maintaining scalability and robustness. The concept of human swarm interface (HSI) research has gained attention in this context.
Categories of Control
HSI research categorizes different controls into four groups:
- Algorithmic Control: This involves switching between different algorithms that implement desired behaviors, such as search algorithms.
- Parametric Control: Operators can adjust swarm parameters, such as the number of agents in the swarm.
- Environmental Control: Operators use the environment as a guideline for the swarm, for example, by setting points of interest.
- Agent Control: Operators determine how agents influence each other, such as dictating swarm formation.
Complexity and Challenges
Selecting the appropriate control method poses a challenge, as it depends on various factors. These include the cognitive limitations of the operator, the timing of human-machine interactions, the operator’s understanding of the swarm’s behavior, and how interactions impact swarm robustness.
Using Behavior Trees
To represent evolved supervised control strategies, researchers like Hogg and his team use behavior trees due to their readability and modularity. By employing Genetic Programming and simulating swarm behavior in a controlled environment, researchers explore different interaction methods. It is evident that operator understanding of swarm dynamics and the time spent interacting with swarms significantly influence performance. Additionally, these interactions serve the dual purpose of enhancing human comprehension of swarm dynamics and training operators for more effective supervision.
In conclusion, human-autonomy teaming in swarm robotics is a multidisciplinary field encompassing technical, psychological, and human factors. By addressing the challenges of communication, task allocation, decision making, training, trust, and evaluation, researchers are advancing the integration of humans and autonomous systems in robotic swarm operations. Simultaneously, evolving behavior trees and implementing supervisory controls offer promising solutions to improve the performance and comprehensibility of swarm behaviors. These advancements pave the way for more effective and reliable human-robot collaboration in the fascinating world of swarm robotics.
Conducting Reconnaissance Missions
Strategies for Conducting Searches as a Group
Imagine a group of individuals searching for a valuable object in a vast, unfamiliar area. Their approach to this mission provides insights into effective strategies for conducting reconnaissance missions.
The group begins by convening for a briefing, during which they outline the mission’s objectives and delegate search responsibilities. There are various strategies they employ, such as:
- Division of Labor: The group decides to split up or assign different areas to individual members to cover the most ground efficiently.
- Prioritization: Recognizing that certain locations are more likely to hide the object, they begin their search in these high-probability areas. This strategy increases their chances of early success.
- Multiple Perspectives: In some instances, more than one person examines the same location from different angles. This redundancy helps ensure that they don’t overlook potential hiding spots.
- Periodic Updates: After searching the planned area or if someone finds the object, the group regroups to exchange information, reassess their strategy, and decide on the next course of action. This process continues until they either find the object, have more critical tasks, face unexpected obstacles, or decide to abandon the search.
Relating Search Strategies to Autonomous Swarms
These human strategies for conducting searches as a group provide valuable guidance for creating a template for autonomous UAV swarms used in reconnaissance missions. This template divides the reconnaissance mission into two phases: Preflight and Onstation.
In the Preflight phase, the UAV swarm system mirrors the group’s initial briefing:
- Operator-System Interaction: Before the mission begins, there’s a Preflight meeting where the operator and the system collaborate. The operator provides input, including mission objectives and priorities, while the system generates a mission plan. The operator and system can make independent assessments and work together to refine the mission strategy.
- Optimization: The system uses operator inputs to optimize the mission, such as dividing the search area into sub-areas using Voronoi diagrams. This allows for efficient coverage, considering points of interest. Additionally, the system can use algorithms like RRT* to calculate optimal paths to targets, even adapting to changes or new points of interest.
- Mission Planning: The system presents a comprehensive mission plan, including the optimized route, sub-swarms, and estimated time to complete the mission.
- Adaptability: The operator retains the ability to assess and modify the mission plan as necessary, addressing any concerns or making adjustments.
When the Preflight phase is complete, the swarm transitions to the Onstation phase:
- Decentralized Operation: The swarm carries out the mission based on the operator’s plan. It should be able to adapt and make intelligent decisions based on the changing environment.
- Communication: Agents within the swarm must maintain communication to maximize their collective efficiency. They share information about their search areas, status, and potential obstacles. In case an agent loses contact with the swarm, a plan to reconnect or choose an alternative search area is essential.
- Goal Fulfillment: The mission continues until its objectives are met, or a defined end condition is reached, such as completing a specific area or returning at a predetermined time.
Basic Mission Scenario
In this basic mission scenario, the operator’s communication with the swarm is limited to before and after the mission. The operator has prior knowledge of the mission area, interests, and may determine the mission’s completion time.
Desired Swarm Functions for Reconnaissance
To achieve successful reconnaissance missions, a set of desired functions is outlined, taking inspiration from human group search strategies and building upon the blackboard concept:
Preflight Phase Functions:
- Brief: The operator defines mission parameters, areas of interest, and return time, using a swarm GUI that enables efficient communication with the swarm.
- Optimize: The system optimizes mission elements based on the operator’s input, creating sub-swarms and calculating optimal paths for each region.
- Plan: The system presents a comprehensive mission plan, incorporating the Voronoi diagram, sub-swarms, and optimized paths.
- Assess & Modify: The operator can evaluate and adjust the mission plan as necessary, addressing any concerns or making changes.
Onstation Phase Functions:
- Search: Agents execute the search strategy defined in the Preflight phase. This can be chosen based on operator input and may involve randomized or structured search patterns.
- Track: Agents track targets of interest, whether prioritized by the operator or for confirmation purposes, using object recognition technology.
- Whisper: Agents communicate with short-range signals to maintain stealth and avoid exposing their presence.
- Shout: Agents share critical information across the swarm, alerting others to potential threats or important discoveries, contributing to the collective awareness.
- Formation: The swarm selects the most suitable formation for the task, whether flying as a group, in smaller subgroups, or individually.
- Sharing Information: Agents share information to create a comprehensive view of the mission’s progress, enabling effective collaboration within the swarm.
- Request Help: Agents can request assistance when tracking high-priority targets or dealing with unexpected challenges. This can be done discreetly or openly, depending on the urgency of the situation.
These functions are designed to enhance the efficiency, adaptability, and coordination of UAV swarms in reconnaissance missions, drawing upon both human group search strategies and advanced technological capabilities.
The Use of Behavior Trees for Controlling UAV Swarms
This chapter delves into the core research of this thesis, exploring the application of behavior trees (BTs) as a means of controlling UAV swarms. It begins with an examination of the logical structure of BTs and their potential to create desired swarm behaviors. The research involves simulating various simplified behavior trees within the Unity game engine, assessing the impact of operator input, and observing how the swarm behaves. The chapter also investigates Unity’s capabilities as a simulation tool for more complex functions. Subsequently, a comprehensive behavior tree designed for real-life reconnaissance missions is proposed and compared to the MASC architecture, followed by a discussion of their strengths and weaknesses.
Simplified Behavior Trees for Simulation of Logic
In the pursuit of determining the viability of behavior trees for controlling UAV swarms, the research involves the creation and simulation of three simplified control structures within Unity. The aim is to assess whether behavior trees can enable operators to influence the tactical strategy of the swarm while ensuring mission success. These simulations explore the logic and practicality of behavior trees in shaping a control system for UAV swarms.
Method
The research involves the creation of simplified behavior trees, which are designed based on desired swarm functions defined before.
The behavior trees are visualized using diagrams.net software, providing a blueprint for creating the simulations. These simulations are executed within the Unity game engine, a platform that offers features such as physics engines and collision detection, making it suitable for early logic simulations of behavior trees and swarm dynamics. The Panda BT extension within Unity is used to run behavior trees and visualize their execution in real time.
The potential for simulating more complex systems, including sensors, communication protocols, and intricate behaviors, is also explored by examining prior work on simulating robotics and sensors within Unity.
Procedure
The research begins by deriving a simplified control structure from the basic mission scenario outlined before and the desired swarm functions defined . Three progressively more complex behavior trees are created for simulation, each designed to fulfill specific goals defined for the UAV swarm.
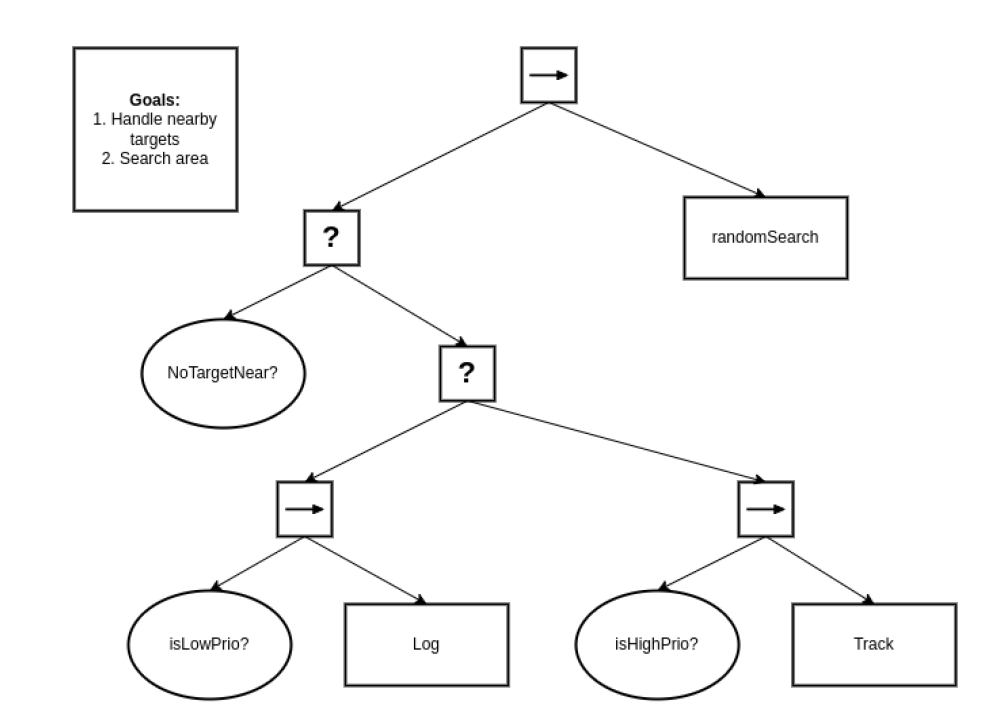
- First Behavior Tree: The initial behavior tree, as seen in Figure FBT1 , includes just three leaf nodes to evaluate the BT design strategy, the Unity environment, and the Panda BT extension. This tree has two primary goals: handling nearby targets and searching the area. The order of these goals determines their priority. Agents first check for nearby targets and, if found, track them. If no targets are nearby, the agents conduct a random search of the area. This initial implementation doesn’t harness the collaborative potential of multiple UAVs.
Figure FBT1. – Graphical representation of the first behaviour tree together with desired goals, used for simulation of logic.

- Second Behavior Tree: The second behavior tree, depicted in Figure SBT2, retains the same goals as the first but introduces operator interaction. The operator can now choose between two tactics for handling targets: high-priority target handling, where the UAV tracks the target if found, or low-priority target handling, where the UAV only logs the target’s position. The swarm continues to use the “randomSearch” tactic if no nearby targets are detected. While the operator can interact with the swarm in this tree, the collaborative aspect is limited.
Figure SBT2. – Graphical representation of the second behaviour tree together with desired goals, used for simulation of logic.
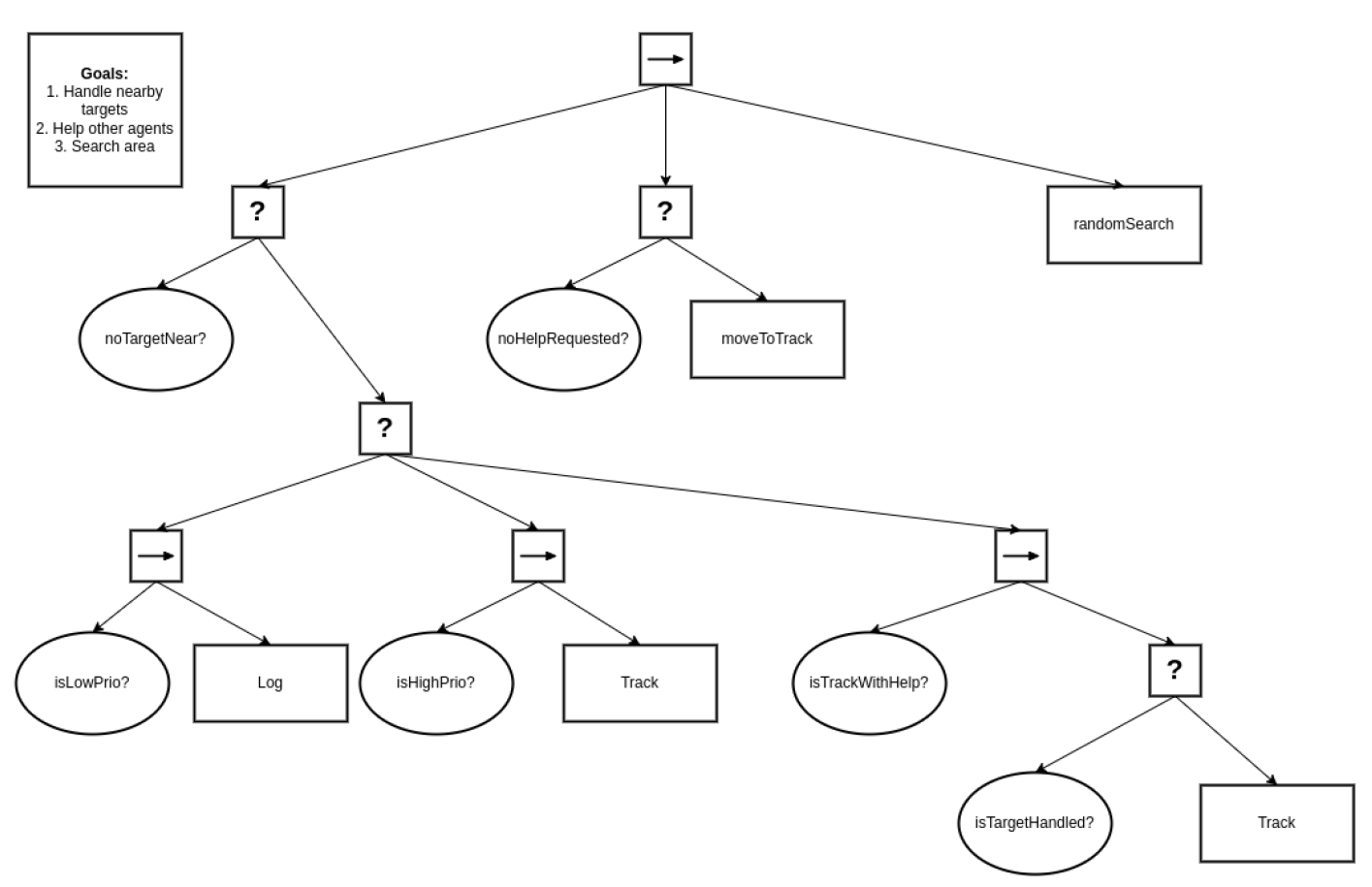
- Third Behavior Tree: Building on the second tree, the third behavior tree, shown in Figure TBT3, introduces more significant operator input and fosters interaction and collaboration among swarm agents. This tree adds a new goal, “TrackWithHelp,” indicating that the first agent finding a target should track it together with a second agent called to provide assistance. Agents are now equipped to check if the target is already being tracked and whether another agent has requested their help. The blackboard is utilized to store information about tracking and help requests. It allows agents to access and modify this information, fostering collaboration among swarm members.
Figure TBT3. Graphical representation of the third behaviour tree together with desired goals, used for simulation of logic. See Appendix A.2 for larger figure.
Analysis
This section provides an in-depth analysis of the insights gained from the logic simulations involving behavior trees in Unity. The primary focus is on understanding the possibilities and challenges revealed during the experimentation with these simulations.
- Behavior Tree Complexity: The complexity of the behavior trees in the simulations grew with each iteration. The first tree was relatively simple, featuring only three leaf nodes. It served as a baseline for assessing the logic and structure of behavior trees. As the complexity increased, certain difficulties became apparent.
- Integration of Operator Input: In the second behavior tree, challenges related to the integration of operator input surfaced. The primary challenge was in presenting the available tactics to the operator in an intuitive way. The use of buttons labeled “low” and “high priority” was adopted, but this approach assumes the operator’s understanding of these tactics. It aligns with the complexities highlighted by the NATO task group regarding human-autonomy interactions.
- Logical Use of Tactics: Another challenge was how to logically incorporate the different tactics within the behavior tree. In the simulation, two subtrees were created, each with a condition/action pair. The condition checked if the corresponding tactic was chosen, and if so, it invoked the action. An alternative approach would be to create two separate subtrees corresponding to the different tactics. While this would make the behavior tree less cluttered, it would also reduce the overview of all available functions.
- Limited Agent Interaction: In the initial simulations, there was no agent-to-agent interaction within the swarm. The swarm’s sole advantage over a single UAV system was the ability to cover multiple areas simultaneously, thus enhancing robustness. However, the simulations did not explore the full potential of swarm collaboration.
- Communication and Blackboard Handling: The third, more complex behavior tree introduced challenges related to information handling and communication. It allowed only the first agent to find a target to track it and request help from another agent. Communicating that a target was already handled required a mechanism to inform other agents of both the target’s status and identity. The simulations addressed this using an external blackboard, facilitating communication among all swarm agents. However, in real-life scenarios, issues such as agents being out of each other’s line of sight and limited bandwidth could complicate communication and blackboard handling. The use of an external blackboard could also affect swarm decentralization.
- Human-Autonomy Interaction Challenges: The simulations underscored the challenges associated with human-autonomy teaming, reflecting concerns highlighted by Miller et al. and the NATO task group. While the simulations did not aim to provide definitive solutions to these challenges, they did serve to explore alternatives and increase understanding of the critical aspects of human-autonomy interaction.
- Effective Operator Communication: A notable challenge was in establishing effective communication between the operator and the autonomous swarm. The simulations highlighted the importance of creating a language and interface that both the operator and the swarm can understand and use effectively.
Results
The results of the three simulated behavior trees indicate that all the conceived missions were accomplished as intended, aligning with the defined goals for each swarm. The simulations demonstrated the practicality of theoretical behavior trees and the suitability of Unity as a platform for implementing high-level swarm behaviors and running simulations.
The simulations also highlighted several key takeaways:
- Importance of Visualizing Behavior Trees: Visualizing behavior trees as diagrams provided an invaluable tool for ensuring all desired functions were included. The diagrams served as a visual representation for discussing the implementation of desired functions and their impact on swarm dynamics.
- Structured Design Strategy: As behavior trees grew in complexity, the importance of a clear and structured design strategy became evident. The method of prioritizing goals and creating condition/action pairs proved effective for ensuring logical functionality. This design approach aligns well with goal-oriented missions often used in military applications.
- Operator-Interaction Challenges: The simulations emphasized the difficulties in creating an operator interface that both the operator and the swarm can understand. This includes presenting tactics in an intuitive manner and addressing the complexities of human-autonomy interactions, echoing the concerns raised by experts.
- Communication and Blackboard Handling: Challenges related to information exchange and blackboard handling were brought to light. While the simulations effectively used an external blackboard for communication, real-world applications may face difficulties related to communication range and maintaining a decentralized structure.
- Unity’s Power and Simplicity: The simulations demonstrated the power and simplicity of Unity as a platform. Its capacity to set up simulations with a vast library of 3D assets and environments, along with its built-in physics engine and robust C# logic, made Unity an excellent tool for cost-effective, time-efficient, and visually accurate swarm dynamics testing.
- Unity’s Potential for Real-World Integration: Unity offers solutions for importing, optimizing, and visualizing 3D data, which can be invaluable when developing swarm systems. It supports the simulation of sensors like cameras and lidar, which can be particularly beneficial in real-world applications. Furthermore, Unity’s integration with the Robot Operating System (ROS) and ROS2 provides a path for connecting control to actual hardware. Additionally, Unity offers solutions for government and aerospace applications, including training military personnel in virtual and extended reality settings.
These results demonstrate the potential and versatility of behavior trees for controlling UAV swarms, in addition to the utility of the Unity platform for simulation and development. The challenges highlighted in the analysis provide valuable insights for refining the application of behavior trees in real-world swarm scenarios.
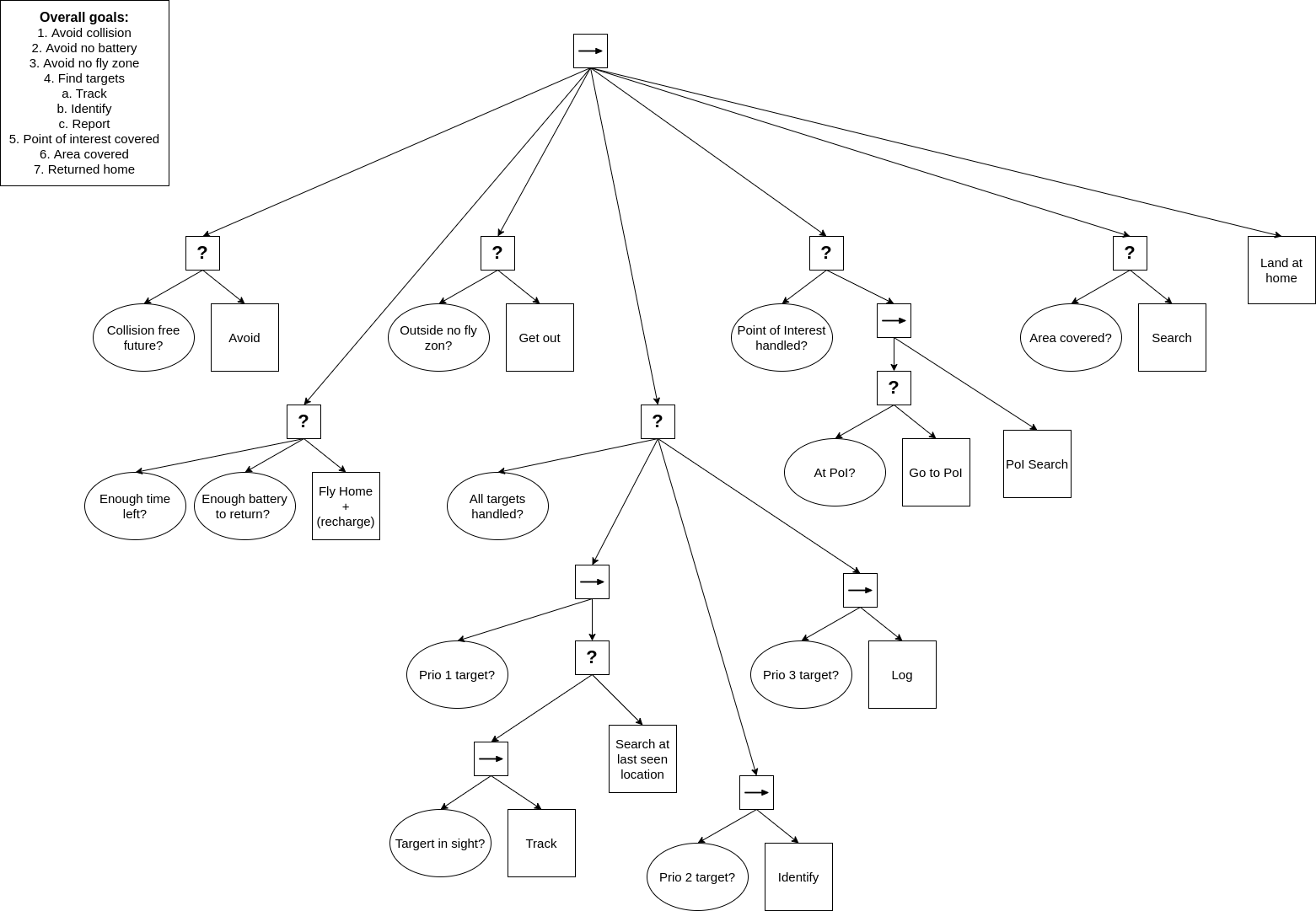
Figure final1 Graphical representation of the complex behaviour tree together with desired goals.
Conclusion
Designing behavior trees for drone swarms is a complex task that requires a deep understanding of the intended use and desired functionalities. The mission scenario and proposed swarm functions provide a starting point, but additional requirements are often necessary to create a comprehensive system. The complexity of behavior trees can be managed through the strategic organization of goals and the use of subtrees. However, the challenge of ensuring completeness remains a persistent concern. Despite these challenges, the development of behavior trees for drone swarms is a crucial step in realizing their potential in various real-world applications.
Bibliography
[1] R. Arnold, K. Carey, B. Abruzzo, and C. Korpela, “What is a robot swarm: A defini- tion for swarming robotics”, in 2019 IEEE 10th Annual Ubiquitous Computing, Elec- tronics Mobile Communication Conference (UEMCON), 2019, pp. 0074–0081. doi: 10.1109/UEMCON47517.2019.8993024.
[2] Marketsandmarkets, Drone services market by type, application, industry, solution, and region – global forecast to 2026, 20 Jan 2022, Sep. 2021. [Online]. Available: https:
/ / www . marketsandmarkets . com / Market – Reports / drone – services – market – 80726041.html.
[3] J. F. Guilmartin, Unmanned aerial vehicles, 18 January 2022, Jul. 2020. [Online]. Available: https://www.britannica.com/technology/unmanned-aerial-vehicle.
[4] R. Dixon, Azerbaijan’s drones owned the battlefield in nagorno-karabakh — and showed future of warfare, Nov. 2020. [Online]. Available: https://www.washingtonpost. com/world/europe/nagorno-karabkah-drones-azerbaijan-aremenia/2020/11/ 11/441bcbd2-193d-11eb-8bda-814ca56e138b_story.html.
[5] T. Tahir, Israel uses first-ever ai drone swarm in battle to hunt down and blitz hamas terrorists with no human input, Jul. 2021. [Online]. Available: https://www.thesun. co.uk/news/15497216/israel-first-ever-drone-swarm-hamas/.
[6] C. Miller and H. Funk, “Task-based interface management: A rotorcraft pilot’s asso- ciate example”, in Proceedings of the AHS Crew Systems Technical Specialists Meeting, Philadelphia PA, Sep. 1997.
[7] K. Gilesa and K. Giammarco, “Mission-based architecture for swarm composability (masc)”, in Proceedings of the Complex Systems Conference, Chicaco IL, Oct. 2017.
[8] C. Miller, M. Pelican, and R. Goldman, “Tasking’ interfaces for flexible interaction with automation: Keeping the operator in control”, in Proceedings of the International Conference on Intelligent User Interfaces, Redonda Beach CA, Jan. 1999.
[9] C. Millera, R. Goldman, H. Funk, P. Wu, and B. Pate, “A playbook approach to vari- able autonomy control: Application for control of multiple, heterogeneous unmanned air vehicles”, in Proceedings of the American Helicopter Society 60th Annual Forum, Baltimore MD, Jun. 2004.
[10] B. Browning, J. Bruce, M. Bowling, and M. Veloso, “Stp: Skills, tactics and plays for multi-robot control in adversarial environments”, Proc Inst Mech Eng Part I Sys Control Eng, vol. 219, Nov. 2004.
[11] R. P. Goldman, C. Miller, P. Wu, and H. Funk, “Optimizing to satisfice: Using opti- mization to guide users”, in Proceedings of the CAHS International Specialists’ Meet- ing on Unmanned Rotorcraft, Phoenix AZ, Jan. 2005.
[12] M. Petty and E. Weisel, “A composability lexicon”, in Proceedings of the Spring 2003 Simulation Interoperability Workshop, Orlando FL, Mar. 2003.
[13] T. G. HFM-247, “Human-autonomy teaming: Supporting dynamically adjustable col- laboration”.
[14] G. P. A. Edmondson R. Bohmer, “Speeding up team learning”, Harvard Bus Rev, vol. 79, Oct. 2001.
[15] S. Jones, M. Studley, S. Hauert, and A. Winfield, “Evolving behaviour trees for swarm robotics”, Nov. 2016.
[16] A. L. Nelson, G. J. Barlow, and L. Doitsidis, “Fitness functions in evolutionary robotics: A survey and analysis”, Robotics and Autonomous Systems, vol. 57, no. 4,
pp. 345–370, 2009, issn: 0921-8890. doi: https://doi.org/10.1016/j.robot.2008.
09.009. [Online]. Available: https://www.sciencedirect.com/science/article/ pii/S0921889008001450.
[17] G. Francesca, M. Brambilla, A. Brutschy, V. Trianni, and M. Birattari, “Automode: A novel approach to the automatic design of control software for robot swarms”, Swarm Intell, vol. 8, pp. 1–24, Jun. 2014.
[18] M. Colledanchise and P. Ögren, “Behavior trees in robotics and ai”, Jul. 2018. doi: 10 . 1201 / 9780429489105. [Online]. Available: http : / / dx . doi . org / 10 . 1201 / 9780429489105.
[19] E. Hogg, S. Hauert, D. Harvey, and A. Richards, “Evolving behaviour trees for su- pervisory control of robot swarms”, Artificial Life and Robotics, vol. 25, pp. 569–577, Nov. 2020.
[20] A. Kolling, P. Walker, N. Chakraborty, K. Sycara, and M. Lewis, “Human interac- tion with robot swarms: A survey”, IEEE Transactions on Human-Machine Systems, vol. 46, no. 1, pp. 9–26, 2016.
[21] E. Weisstein, Voronoi diagrams, From MathWorld–A Wolfram Web Resource. [On- line]. Available: https://mathworld.wolfram.com/VoronoiDiagram.html.
[22] S. Karaman and E. Frazzoli, “Sampling-based algorithms for optimal motion plan- ning”, The international journal of robotics research, vol. 30, no. 7, pp. 846–894, 2011.
[23] J. Wiech, V. Eremeyev, and I. Giorgio, “Virtual spring damper method for nonholo- nomic robotic swarm self-organization and leader following”, Continuum Mechanics and Thermodynamics, vol. 30, Sep. 2018. doi: 10.1007/s00161-018-0664-4.
[24] Unity-Technologies, Unity game engine, 18 January 2022. [Online]. Available: https:
//unity.com.
[25] JGraph-Ltd, Diagrams.net, 18 January 2022. [Online]. Available: https : / / www . diagrams.net/.
[26] E. Begue, Panda behaviour tree, 18 Jan 2022, Jan. 2016. [Online]. Available: http:
//www.pandabehaviour.com/.



{kind=link}