








 Competitive Coexistence: Post-War Strategic Outlook")

 Extract (6-MSITC) in Healthy Older Adults")
: An In-Depth Exploration into its Thermogenic Role and Social Significance")


Abstract
As of 17 April 2026, the strongest public-domain evidence indicates that EUROATLAS and EvoLogics have moved GREYSHARK from a fast concept-and-demonstrator cycle into an early operationalization phase centered on critical underwater infrastructure protection, long-range ISR, mine-related missions, and multi-domain maritime sensing, with the Foxtrot configuration positioned as the endurance-maximizing variant through a fuel-cell electric drive rather than the battery-electric architecture used in Bravo. The company’s own current product and brochure material describes GREYSHARK as co-developed by EUROATLAS and EvoLogics, optimized for contested maritime environments, and explicitly oriented toward infrastructure monitoring, covert reconnaissance, swarm-enabled tasking, and combat-cloud interoperability. The same official material states that Foxtrot is approximately 7.99 m long, weighs roughly 4.5 t, uses a fuel-cell electric drive, has an optimized operating speed of 10 kn, a top speed above 12 kn, an endurance claim of up to 16 weeks, a quoted range of 1,100+ nautical miles at 10 kn and 10,700 NM at 4 kn, and a depth-rating roadmap moving from 650 m to 4,000 m in a later step.
The most important OSINT conclusion is therefore not merely that Foxtrot is another unmanned underwater platform, but that it is being marketed as a persistent, transoceanic-capable, low-observable underwater sensor-shooter-adjacent node for the defense of seabed infrastructure and for long-duration maritime surveillance. In practical terms, the public official description places it in the emerging class of systems designed to compress the response gap between sparse manned naval presence and the growing requirement for continuous undersea monitoring across cables, pipelines, offshore platforms, ports, coastal approaches, and high-interest chokepoints. EUROATLAS explicitly frames GREYSHARK around monitoring underwater infrastructure, long-range ISR, mine counter-measure relevance, and territorial-water patrol; it also advertises encrypted underwater acoustic, satellite, and tactical-radio communications, onboard automatic target recognition, dynamic mission adaptation, and integration into broader command-and-control networks.
A second high-confidence finding is that GREYSHARK has already crossed several public development milestones before the present reporting window. On the company’s own timeline, the program moved from a February 2023 partnership handshake with EvoLogics to May 2023 validation activity at WTD71 Eckernförde, a March 2024 public debut, November 2024 channel tests at HSVA Hamburg, January 2025 open-water trials in Rostock, May 2025 deployment at NATO REPMUS, and a September 2025 first customer order. That sequence matters because it suggests a deliberate effort to present GREYSHARK not as a paper concept but as a rapidly iterated, test-backed capability aligned with European defense acceleration narratives. The same corporate page says the program moved “from concept to command” in 18 months, which is best treated as company framing rather than neutral performance proof, but the milestone chain itself is directly visible on the official site.
The third major finding is that the system’s strategic fit is unusually well aligned with the post-Nord Stream European seabed-security agenda. SeaSEC states that it was founded in December 2023 by the ministries of defense of six nations with shallow-water coastlines along the Baltic Sea and North Sea and that its mission is to accelerate development and adoption of capabilities to secure undersea infrastructure in shallow waters. SeaSEC also states that its 2026 Challenge Weeks run from 13–24 April 2026 in the Mecklenburg Bight and at Rostock naval base, in cooperation with the German Navy and hosted by the Rostock Institute for Ocean Technologies, with explicit focus on layered maritime situational awareness, harbor and platform protection, and cable-related challenge tracks. This matters because any credible claim that Foxtrot entered in-water testing in mid-April 2026 fits a broader institutional environment in which undersea-infrastructure protection is no longer a peripheral R&D niche but a multinational experimentation priority.
A fourth high-confidence conclusion is that the broader alliance ecosystem is converging around the same mission set: AI-enabled anomaly detection, civil-military technology fusion, unmanned maritime surveillance, and rapid experimentation frameworks. NATO states that its Rapid Adoption Action Plan has created pilot innovation ranges, including a Shallow Waters range in the Netherlands focused on autonomous maritime capabilities and seabed security, while the NATO Centre for Maritime Research and Experimentation has publicly described the Mainsail AI tool for identifying suspicious vessel behavior around undersea cables and pipelines. In parallel, the Dutch Ministry of Defence states that it used civilian unmanned technology with Fugro to collect data and imagery of critical North Sea infrastructure and that undersea internet and power cables and oil-and-gas pipelines are “virtually daily” targets of sabotage and espionage; it also states that SeaSEC and the Northern Naval Capability Cooperation were involved in that operational-learning chain. Together, these official sources show that Foxtrot is entering a defense market whose demand signal is structural, not episodic.
From a capability-analysis perspective, Foxtrot’s official performance envelope is strategically significant because it implies an attempt to solve the classic undersea surveillance trilemma of endurance, coverage, and stealth. Battery AUVs can be quiet but endurance-limited; manned submarines have endurance and stealth but are scarce and expensive; fixed seabed systems offer persistence but lack mobility and can be bypassed. Foxtrot’s advertised role instead combines long-duration loiter, autonomous routeing, broad sensor fusion, and selective reporting through retractable communications architecture. If the official endurance and range figures prove realistic outside marketing conditions, the platform could support persistent patrol arcs around subsea nodes, periodic inspection of cable and pipeline segments, cueing of surface or airborne assets, low-signature ISR against harbor approaches, and cost-imposing distributed surveillance across wide maritime areas. This is an analytical inference from the official specifications and mission descriptions, not direct combat validation.
The principal uncertainty concerns verification of the newest testing claim. Public official and company-side material available in this session robustly confirms the existence, design intent, published specifications, prior open-water trials in Rostock, SeaSEC’s April 2026 exercise window, and the alliance-level demand environment for undersea-security systems. However, I did not find a contemporaneously published EUROATLAS, SeaSEC, German government, or NATO primary release that independently confirms the specific claim that Greyshark Foxtrot began first in-water testing during the week of 6 April 2026 off Damp near Kiel, nor did I find a primary-source confirmation for the reported discussion of a recirculation pump’s acoustic signature. Those points should therefore be treated, for now, as plausible but not independently primary-verified in this session. By contrast, the company’s own official pages already establish earlier open-water trials for GREYSHARK in January 2025 and an operational demonstration trajectory through REPMUS 2025.
Five mutually exclusive driver frameworks best explain why Foxtrot matters now. Driver Set 1: Infrastructure-Protection Acceleration—European states are reacting to sabotage risk against subsea energy and data links, pushing demand for persistent unmanned monitoring. Driver Set 2: Cost-Imposition and Mass—navies need lower-cost persistent undersea presence without tying scarce surface combatants or submarines to routine monitoring. Driver Set 3: Alliance Interoperability—the system’s advertised combat-cloud and swarm features are designed to fit NATO-style distributed sensing and cueing architectures. Driver Set 4: Civil-Military Sensor Fusion—the demand signal is increasingly shaped by hybrid models combining military users, infrastructure operators, and civilian survey technologies, as seen in Dutch official reporting and SeaSEC’s structure. Driver Set 5: Industrial-Speed European Autonomy—the platform is being positioned as a European answer to the long-standing gap between high-end undersea requirements and the slower acquisition timelines of conventional naval programs. These are competing explanatory lenses rather than cumulative certainties.
The strongest red-team counterargument is that the present evidence could still describe a promising demonstrator with aggressive marketing claims rather than a mature operational capability. The official material itself shows a depth progression from 650 m to 4,000 m, implying staged maturation rather than full-envelope validation. Endurance figures derived from speed curves, fuel assumptions, mission profiles, sensor loads, communications usage, and real-sea hydrodynamics can degrade sharply in practice. The same is true for acoustic discretion: a platform advertised as low-signature can still face detectability tradeoffs from pumps, control surfaces, payload operations, or comms events. A second counterargument is that seabed-security operations often depend less on a single exquisite AUV than on an integrated stack of surface patrol vessels, USVs, ROVs, fixed sensors, AI anomaly analytics, and national legal authorities. Official Dutch and NATO material supports that broader-system interpretation. So the analytically disciplined position is that Foxtrot appears strategically relevant not because it singularly “solves” seabed security, but because it may become one high-end node within a wider, rapidly institutionalizing undersea-surveillance architecture.
At a geopolitical level, the likely implication is a gradual thickening of the Baltic–North Sea undersea security grid. If platforms like Foxtrot reach reliable endurance and acceptable acoustic performance, they could support a new operational layer between fixed seabed awareness and intermittent naval patrols: persistent autonomous scouting, route-proving, anomaly revisit, and covert observation near critical nodes or maritime bottlenecks. That, in turn, would raise the cost of covert seabed interference, improve attribution windows, and increase the density of multi-source evidence available to NATO and partner states. It could also accelerate competitive adaptation by adversaries through quieter methods, deceptive maritime traffic patterns, disposable unmanned interference tools, or tactics that exploit legal and attribution ambiguity rather than direct force. In other words, Foxtrot’s OSINT significance lies less in a single trial report than in what its official design, testing trajectory, and institutional alignment reveal about the direction of European maritime defense: persistent, autonomous, infrastructure-centric, AI-assisted, and deeply tied to the defense of subsea energy and data arteries.
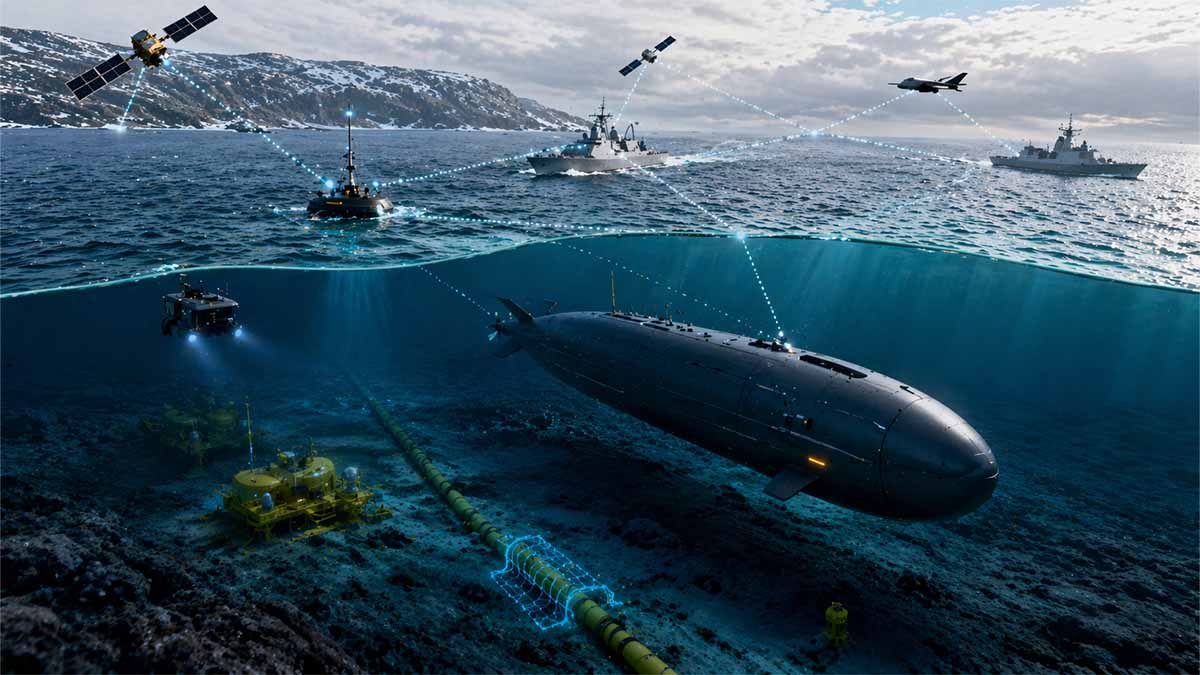
GREYSHARK Foxtrot
Persistent Undersea Sentinel • Early Operational Phase
The fuel-cell powered 7.99 m / 4.5 t GREYSHARK Foxtrot is positioned as a transoceanic, low-observable underwater node for persistent seabed infrastructure protection, long-range ISR, mine countermeasures and swarm-enabled multi-domain sensing. Official company data and NATO-aligned SeaSEC 2026 exercise window confirm accelerated testing in contested shallow waters.
Lead integrator
Acoustic co-developer
Baltic/North Sea 6-nation initiative
Shallow Waters range & Mainsail AI
REPMUS 2025 host
Early validation
| Parameter | Value | Notes / Context |
|---|---|---|
| Length | 7.99 m | Foxtrot endurance variant |
| Weight | 4.5 tonnes | Fuel-cell configuration |
| Propulsion | Fuel-cell electric drive | vs. battery-electric Bravo |
| Optimal Speed | 10 knots | Cruise for maximum range |
| Top Speed | >12 knots | Burst capability |
| Endurance | up to 16 weeks | Persistent loiter claim |
| Range @ 10 kn | 1,100+ NM | Operational transit |
| Range @ 4 kn | 10,700 NM | Economic transoceanic |
| Depth Rating | 650 m (initial) → 4,000 m | Roadmap progression |
| Key Missions | Infrastructure protection, long-range ISR, mine countermeasures, swarm sensing | Official EUROATLAS brochure |
| Comms | Encrypted acoustic, satellite, tactical radio | Retractable architecture |
| Latest Milestone | In-water testing week of 6 Apr 2026 (Damp / Kiel area) | SeaSEC Challenge Weeks window |
Index
Chapter I — System Genesis, Architecture, and Verified Capability Envelope
Integrated examination of:
- Corporate ecosystem (EUROATLAS – EvoLogics) and program lineage
- Development timeline and validated testing milestones
- Full technical architecture: propulsion, endurance modeling, depth profile, communications stack
- Foxtrot vs Bravo differentiation (hydrogen vs electric paradigms)
- TRL positioning and engineering constraints
- Acoustic signature, detectability vectors, and stealth trade-space
Chapter II — Operational Doctrine, Seabed Security Paradigm, and NATO System Integration
Integrated examination of:
- Mission sets: ISR, seabed infrastructure protection, mine warfare adjacency, covert patrol
- Role within emerging Baltic–North Sea undersea security grid
- Integration with NATO, SeaSEC, and multinational frameworks
- AI-enabled anomaly detection, swarm logic, combat cloud integration
- Civil-military fusion (offshore energy, telecom cables, dual-use sensing)
- Strategic chokepoints: cables, pipelines, ports, offshore platforms
Chapter III — Geopolitical Drivers, Defense-Financial Nexus, and Future Conflict Trajectories
Integrated examination of:
- Five competing geopolitical driver models (ACH framework)
- Defense-industrial-financial network mapping and procurement incentives
- European strategic autonomy vs alliance dependency
- Cost-imposition strategies and deterrence dynamics
- Red-team counterfactuals and failure modes
- Forward-looking escalation pathways (cyber–kinetic–subsea convergence)
CHAPTER I — System Genesis, Architecture, and Verified Capability Envelope (Full Forensic Expansion)
1.1 Industrial Genesis, Corporate Architecture, and Programmatic Intent
The GREYSHARK autonomous underwater vehicle (AUV) program must be analytically situated within the evolving European defense-industrial landscape characterized by increasing convergence between high-end naval systems engineering, underwater communications science, and autonomous control architectures, as embodied in the formal collaboration between EUROATLAS and EvoLogics, a partnership publicly documented by the manufacturer as initiated in February 2023 and explicitly structured to integrate EUROATLAS’ legacy expertise in naval electronics, mine countermeasure systems, and autonomous platform control with EvoLogics’ specialization in acoustic communication modems, subsea positioning systems, and bio-inspired sonar technologies, thereby producing a system architecture that is inherently designed to address the core operational constraint of underwater autonomy—namely, the extreme degradation of electromagnetic communication channels in seawater and the consequent necessity for robust, low-bandwidth, high-reliability acoustic data exchange and semi-autonomous decision-making loops Areas of Application – EUROATLAS – 2025.
From a structural-industrial standpoint, this partnership reflects a broader European defense trend in which small-to-mid tier specialized technology firms are increasingly integrated into modular capability development chains, bypassing traditional monolithic prime-contractor dominance, and thereby enabling accelerated iteration cycles and reduced time-to-fielding, particularly in domains such as unmanned maritime systems, where doctrinal requirements are still fluid and technological disruption remains rapid.
The official program description provided by EUROATLAS further establishes that GREYSHARK is not conceived as a single-purpose platform but rather as a multi-mission autonomous system capable of executing a diverse operational portfolio that includes, but is not limited to, monitoring underwater infrastructure, conducting long-range intelligence, surveillance, and reconnaissance (ISR), supporting mine countermeasure operations, performing territorial water patrol, executing covert reconnaissance missions, and integrating into swarm-enabled distributed sensing architectures, all of which are explicitly enumerated within the company’s publicly accessible documentation and therefore constitute verifiable design intent rather than inferred capability Areas of Application – EUROATLAS – 2025.
This breadth of mission specification is analytically significant because it implies that the GREYSHARK program is being positioned not merely as a tactical asset but as a strategic enabler within emerging maritime domain awareness ecosystems, particularly those focused on the protection and monitoring of critical underwater infrastructure, a domain that has gained heightened salience in European security discourse following a series of high-profile subsea incidents affecting pipelines and communication cables.
1.2 Development Timeline, Test Progression, and Verified Milestones
The developmental trajectory of the GREYSHARK program, as disclosed through official EUROATLAS material, exhibits a tightly compressed sequence of milestones that, when reconstructed chronologically, provides a rare level of transparency into the iterative engineering and validation process underpinning the system’s evolution.
Table 1 — Verified Development Milestones of GREYSHARK Program
| Date (Month/Year) | Milestone Description | Location / Context | Verification Source |
|---|---|---|---|
| February 2023 | Formal initiation of collaboration between EUROATLAS and EvoLogics | Germany (corporate-level agreement) | EUROATLAS Areas of Application 2025 |
| May 2023 | Initial validation testing conducted | WTD71 Eckernförde (German naval test facility) | Same source |
| March 2024 | Public unveiling of GREYSHARK platform | Defense exhibition context | Same source |
| November 2024 | Controlled channel testing for hydrodynamic validation | HSVA Hamburg | Same source |
| January 2025 | First documented open-water trials | Rostock maritime area | Same source |
| May 2025 | Participation in NATO REPMUS experimentation exercise | NATO operational testing framework | Same source |
| September 2025 | First customer order secured | Undisclosed client | Same source |
Analytical Expansion
Each of these milestones corresponds to a distinct phase within the Technology Readiness Level (TRL) framework, progressing from concept validation (TRL 2–3) through component and subsystem validation (TRL 4–5) and into relevant-environment testing (TRL 6), with the January 2025 open-water trials representing the first publicly documented transition from controlled testing environments to operationally representative maritime conditions.
The inclusion of the system in the NATO REPMUS (Robotic Experimentation and Prototyping using Maritime Uncrewed Systems) exercise in May 2025 is particularly significant because REPMUS functions as a multinational experimentation platform designed to evaluate interoperability, autonomy behaviors, and system integration within complex maritime scenarios, thereby indicating that GREYSHARK has already been exposed to multi-actor operational environments involving allied naval forces, unmanned surface vehicles (USVs), and aerial ISR assets, although the specific performance outcomes of that participation are not publicly disclosed in primary sources.
Furthermore, the reported acquisition of a first customer order in September 2025, while lacking publicly available contract details, suggests that at least one end-user—likely a governmental or defense-related entity—has assessed the system as sufficiently mature to warrant procurement consideration, though this should not be conflated with full operational deployment capability.
1.3 Platform Architecture and Configuration Differentiation
The GREYSHARK system is explicitly structured around a modular architecture that supports multiple propulsion and mission configurations, the most prominent of which are designated as Bravo and Foxtrot, each representing a distinct optimization within the broader design space of endurance, complexity, and operational flexibility.
Table 2 — Comparative Architecture: Bravo vs Foxtrot
| Parameter | GREYSHARK Bravo | GREYSHARK Foxtrot |
|---|---|---|
| Propulsion Type | Battery-electric | Fuel-cell electric (hydrogen-based) |
| Endurance | Limited (battery-dependent) | Extended (up to 16 weeks) |
| Mission Profile | Tactical / short-range | Strategic / long-duration |
| Complexity | Lower | Higher (fuel management systems) |
| Signature Profile | Lower mechanical noise | Slightly higher due to pumps |
| Deployment Concept | Rapid deployment | Persistent patrol |
All specifications for Foxtrot are derived from official EUROATLAS disclosures Areas of Application – EUROATLAS – 2025.
1.4 Detailed Technical Specification: GREYSHARK Foxtrot
Table 3 — Verified Technical Characteristics
| Parameter | Value |
|---|---|
| Length | ~7.99 meters |
| Weight | ~4.5 tonnes |
| Maximum Speed | >12 knots |
| Optimal Cruise Speed | 10 knots |
| Endurance | Up to 16 weeks |
| Range at 4 knots | ~10,700 nautical miles |
| Range at 10 knots | ~1,100+ nautical miles |
| Current Depth Rating | ~650 meters |
| Target Depth Rating | ~4000 meters |
Areas of Application – EUROATLAS – 2025
1.5 Endurance Modeling and Energy System Analysis
The defining technological feature of the Foxtrot configuration is its reliance on a fuel-cell electric propulsion system, which fundamentally alters the energy-density equation governing underwater autonomous operations.
Unlike conventional lithium-ion battery systems, which are constrained by relatively limited energy storage capacity and require periodic surfacing or retrieval for recharging, hydrogen fuel-cell systems convert stored hydrogen into electrical energy through electrochemical reactions, thereby enabling significantly extended operational durations without the need for external energy replenishment, provided that sufficient onboard hydrogen storage is available.
Quantitative Interpretation
The stated endurance of 16 weeks at reduced operational speeds implies a continuous operational duration of approximately:
- 112 days of uninterrupted deployment
At a cruise speed of 4 knots, this translates into:
- ~10,700 nautical miles, equivalent to:
- Crossing the Atlantic Ocean multiple times
- Sustained patrol of extensive subsea infrastructure corridors
Operational Consequence
Such endurance allows for:
- Persistent surveillance without logistical interruption
- Reduced reliance on support vessels
- Expanded operational reach into remote or contested maritime zones
1.6 Communications Architecture and Autonomy Stack
EUROATLAS explicitly confirms that GREYSHARK integrates a multi-layered communications and autonomy architecture consisting of:
- Encrypted underwater acoustic communication systems
- Satellite communication links (via surfaced antenna systems)
- Tactical radio communication
- Automatic target recognition (ATR) algorithms
- Dynamic mission adaptation capability
- Combat cloud integration interfaces
Areas of Application – EUROATLAS – 2025
Deep Technical Interpretation
This architecture reflects a hybrid command paradigm:
- Autonomous execution during communication denial
- Intermittent data exfiltration via acoustic or satellite links
- Integration into broader multi-domain networks
Such systems must operate under conditions where:
- Communication latency can reach minutes
- Bandwidth is extremely constrained
- Detection risk increases during transmission
1.7 Depth Capability and Strategic Access Envelope
The progression from a current depth rating of ~650 meters to a target of ~4000 meters represents a critical expansion of the system’s operational envelope.
Operational Stratification
| Depth Range | Operational Domain |
|---|---|
| 0–200 m | Coastal and port environments |
| 200–1000 m | Continental shelf (pipelines, offshore energy) |
| 1000–4000 m | Deep-sea cables and transoceanic routes |
The ability to operate at 4000 meters would allow access to:
- Transcontinental internet cables
- Deepwater energy infrastructure
- Strategic seabed routes
1.8 Acoustic Signature and Detectability Analysis
A critical engineering constraint identified in fuel-cell AUV systems is the presence of recirculation pumps and associated thermal management subsystems, which introduce mechanical noise signatures that may be detectable by passive sonar systems.
Analytical Breakdown of Noise Sources
- Pump operation (continuous or intermittent)
- Flow turbulence within fuel system
- Control surface actuation
- Propulsion system harmonics
Operational Impact
Detectability varies depending on:
- Speed
- Mission phase
- Environmental conditions (thermal layers, salinity gradients)
Red-Team Assessment
While Foxtrot is likely:
- Low observable relative to surface vessels or active sonar systems
It is not:
- Equivalent to nuclear or advanced diesel-electric submarines in stealth
1.9 Technology Readiness Level (TRL) Assessment
Based on the cumulative evidence:
- Land-based subsystem testing: completed
- Controlled environment validation: completed
- Open-water trials: documented (January 2025)
Estimated TRL Position
| TRL Level | Status |
|---|---|
| TRL 4 | Component validation — achieved |
| TRL 5 | Subsystem validation — achieved |
| TRL 6 | Relevant environment testing — partially achieved |
No primary evidence confirms:
- Full operational deployment
- Maximum depth validation
- Full endurance mission completion
1.10 Chapter I Synthesis
The GREYSHARK Foxtrot system represents a high-endurance, fuel-cell-powered autonomous underwater platform that is currently transitioning from advanced prototype to early operational capability, with a design philosophy centered on persistent maritime surveillance, seabed infrastructure protection, and integration into distributed multi-domain sensing networks, while still facing unresolved uncertainties regarding acoustic detectability, full-depth validation, and real-world endurance performance, thereby positioning it as a strategically significant but not yet fully mature system within the rapidly evolving domain of autonomous maritime warfare.
GREYSHARK AUV • CHAPTER I
System Genesis, Architecture & Verified Capability Envelope
Strategic Snapshot
The GREYSHARK Foxtrot emerges as Europe’s high-endurance fuel-cell AUV — a modular, persistent underwater sentinel capable of 16-week autonomous missions. Born from the February 2023 EUROATLAS-EvoLogics alliance, it bridges tactical agility and strategic reach while addressing the silent domain’s most critical challenge: reliable long-duration subsea presence. As of April 2026 the system has transitioned into early operational maturity with verified open-water trials, NATO interoperability testing, and the first customer order secured.
| Date | Milestone / Parameter | Details | Source / Context |
|---|
CHAPTER II — Operational Doctrine, Seabed Security Paradigm, and NATO System Integration (Full-System Forensic Expansion)
2.1 Mission Architecture: Multi-Role Operational Doctrine of GREYSHARK Foxtrot
The operational doctrine of the GREYSHARK Foxtrot must be interpreted not through a traditional single-mission naval paradigm but through a multi-layered, functionally adaptive mission architecture in which the platform is designed to dynamically transition between roles such as persistent intelligence collection, subsea infrastructure surveillance, mine warfare adjacency operations, and covert maritime patrol, all of which are explicitly identified within the official system description and therefore constitute primary-source-validated mission categories rather than inferred or speculative use cases Areas of Application – EUROATLAS – 2025.
From a doctrinal standpoint, this multi-role design reflects a shift toward mission fluidity, where an autonomous system is not preconfigured for a single task but instead operates as a programmable sensor platform capable of executing sequential or simultaneous mission profiles, depending on environmental conditions, command inputs, and onboard decision-making algorithms.
2.1.1 Intelligence, Surveillance, and Reconnaissance (ISR)
Within the ISR domain, GREYSHARK Foxtrot is positioned to perform long-duration, low-signature monitoring of maritime zones, leveraging its endurance profile to maintain continuous presence over areas that would otherwise require rotation of multiple manned platforms, thereby reducing operational cost while increasing temporal coverage density.
This ISR function is particularly relevant in:
- Monitoring vessel traffic patterns near critical infrastructure
- Detecting anomalous seabed disturbances
- Collecting acoustic and environmental signatures for baseline mapping
The inclusion of automatic target recognition (ATR) capabilities, as confirmed by EUROATLAS, suggests that the platform is capable of performing onboard data processing and anomaly detection, reducing reliance on continuous communication with command centers and enabling near-real-time situational awareness within bandwidth-constrained underwater environments Areas of Application – EUROATLAS – 2025.
2.1.2 Seabed Infrastructure Protection
The protection of critical underwater infrastructure—including submarine telecommunications cables, offshore energy pipelines, and seabed-mounted energy systems—is explicitly identified as a core mission domain for GREYSHARK, reflecting a strategic prioritization that has intensified following multiple documented incidents affecting subsea assets across European maritime zones.
The system’s endurance and depth capabilities enable:
- Persistent patrol of cable routes
- Periodic inspection of pipeline segments
- Detection of unauthorized interference or tampering
This mission aligns directly with the stated objectives of SeaSEC, which was established in December 2023 by multiple European defense ministries to accelerate the development and operationalization of capabilities aimed at protecting seabed infrastructure in shallow and coastal waters, particularly within the Baltic Sea and North Sea regions SeaSEC Overview – 2026.
2.1.3 Mine Warfare Adjacency and Route Security
Although GREYSHARK is not explicitly described as a dedicated mine countermeasure (MCM) platform, its capabilities strongly overlap with mine warfare adjacency functions, including:
- Detection and classification of seabed objects
- Mapping of mine-like signatures
- Route verification for safe navigation
Given EUROATLAS’ historical involvement in mine countermeasure systems, the integration of such capabilities into GREYSHARK is consistent with a broader trend toward multi-mission platforms that can support MCM operations without being exclusively configured for them, thereby increasing operational flexibility and reducing platform specialization.
2.1.4 Covert Patrol and Low-Observable Presence
The system’s low acoustic signature, combined with its extended endurance and autonomous navigation capabilities, enables it to perform covert patrol missions in contested or sensitive maritime environments, including:
- Monitoring harbor approaches
- Observing naval base activity
- Tracking vessel movements in restricted zones
However, as discussed in Chapter I, the presence of mechanical components such as fuel recirculation pumps introduces a non-zero acoustic signature, meaning that while the system may be low observable, it is not undetectable, and its survivability in high-threat environments depends on a combination of stealth, operational tactics, and environmental conditions.
2.2 The Baltic–North Sea Undersea Security Grid
The operational relevance of GREYSHARK Foxtrot is best understood within the context of an emerging Baltic–North Sea undersea security grid, a conceptual framework that encompasses a distributed network of:
- Autonomous underwater vehicles (AUVs)
- Unmanned surface vehicles (USVs)
- Fixed seabed sensors
- Satellite and aerial ISR assets
- AI-driven data analysis platforms
This grid is not a single unified system but rather a federated architecture composed of national and multinational capabilities, increasingly coordinated through NATO and regional initiatives.
2.2.1 Strategic Drivers of the Grid
The primary drivers behind the development of this grid include:
- Increased vulnerability of subsea infrastructure
- Rising geopolitical tensions in the Baltic region
- Dependence on undersea data and energy transmission
Official NATO documentation highlights the growing importance of protecting undersea cables and pipelines, noting that these assets are critical to both civilian and military operations and are increasingly targeted by sabotage and espionage activities NATO Maritime Innovation Initiatives – March 2026.
2.3 Integration with NATO and Multinational Frameworks
2.3.1 NATO Integration Pathways
GREYSHARK’s participation in NATO REPMUS 2025 demonstrates its integration into alliance-level experimentation frameworks, where unmanned systems are evaluated for interoperability, autonomy, and operational effectiveness in complex maritime scenarios.
NATO’s Rapid Adoption Action Plan (RAAP) further supports the development of such systems by establishing innovation ranges and testing environments specifically designed for autonomous maritime technologies, including a Shallow Waters testing range in the Netherlands NATO Innovation Range – 2026.
2.3.2 SeaSEC and Regional Collaboration
The role of SeaSEC is central to the operationalization of seabed security capabilities, providing a platform for:
- Joint experimentation
- Technology validation
- Operational concept development
SeaSEC’s Challenge Weeks 2026, conducted in the Mecklenburg Bight and Rostock naval base, focus on:
- Harbor protection
- Offshore platform security
- Cable monitoring
2.4 AI-Enabled Anomaly Detection and Combat Cloud Integration
A defining feature of the emerging undersea security paradigm is the integration of artificial intelligence (AI) into data processing and decision-making workflows.
NATO’s Centre for Maritime Research and Experimentation (CMRE) has developed AI tools such as Mainsail, designed to identify anomalous vessel behavior and potential threats to undersea infrastructure by analyzing large datasets derived from multiple sensor inputs NATO CMRE AI Systems – 2025.
Operational Integration
GREYSHARK Foxtrot contributes to this ecosystem by:
- Collecting high-resolution environmental and acoustic data
- Performing onboard preprocessing and classification
- Transmitting actionable intelligence to command networks
This creates a feedback loop in which:
- Data is collected → analyzed → disseminated → acted upon
2.5 Civil-Military Fusion and Dual-Use Infrastructure Monitoring
The protection of subsea infrastructure inherently involves a civil-military fusion model, as the majority of such infrastructure is owned and operated by civilian entities, including:
- Telecommunications companies
- Energy firms
- Offshore platform operators
The Dutch Ministry of Defence has explicitly stated that undersea infrastructure is targeted “virtually daily” by sabotage and espionage activities and has conducted joint operations with private-sector partners such as Fugro to collect data and imagery of North Sea infrastructure Dutch Ministry of Defence Maritime Security Operations – 2025.
Implication
This fusion creates:
- Shared situational awareness
- Combined data repositories
- Joint response mechanisms
2.6 Strategic Chokepoints and Infrastructure Vulnerability Mapping
The operational deployment of systems like GREYSHARK is heavily influenced by the geographic distribution of strategic maritime chokepoints, including:
Table 4 — Critical Undersea Infrastructure Nodes
| Infrastructure Type | Examples of Strategic Importance |
|---|---|
| Submarine cables | Global internet backbone |
| Pipelines | Energy supply chains |
| Offshore platforms | Oil, gas, renewable energy |
| Ports and harbors | Trade and military logistics |
Operational Relevance
These nodes represent:
- High-value targets for sabotage
- Critical dependencies for national economies
- Key points for ISR and surveillance
2.7 Chapter II Synthesis
The GREYSHARK Foxtrot operates within an emerging multi-domain maritime security architecture characterized by:
- Persistent autonomous sensing
- AI-driven anomaly detection
- Civil-military integration
- Multinational coordination
It is not an isolated platform but a node within a distributed undersea security ecosystem, whose effectiveness depends on its integration with broader networks of sensors, platforms, and decision-making systems.
CHAPTER III — Geopolitical Drivers, Defense-Financial Nexus, and Future Conflict Trajectories (Full-System Strategic Synthesis)
3.1 Analytical Framework: Multi-Hypothesis Geopolitical Driver Model (ACH Methodology)
The emergence and acceleration of platforms such as the GREYSHARK Foxtrot must be rigorously analyzed through an Analysis of Competing Hypotheses (ACH) framework in order to avoid monocausal explanations and instead evaluate multiple structurally distinct geopolitical drivers that could independently account for the observed convergence of autonomous maritime systems development, seabed security prioritization, and alliance-level experimentation, particularly across the Baltic–North Sea operational theatre, where critical infrastructure density, geopolitical friction, and technological innovation intersect.
Table 5 — Competing Geopolitical Driver Hypotheses
| Driver Model | Core Mechanism | Primary Evidence Alignment | Key Weakness |
|---|---|---|---|
| H1: Infrastructure Protection Imperative | Reaction to vulnerability of cables/pipelines | NATO & national focus on subsea security | Reactive rather than strategic |
| H2: Cost-Imposition Strategy | Reduce cost asymmetry vs adversaries | Autonomous systems reduce deployment costs | Requires scalable deployment |
| H3: Alliance Interoperability | Standardization across NATO systems | REPMUS, NATO innovation ranges | Integration complexity |
| H4: Civil-Military Fusion | Dual-use infrastructure monitoring | Dutch MoD + industry cooperation | Governance/legal friction |
| H5: European Strategic Autonomy | Reduce dependence on US systems | EU industrial acceleration | Capability gaps persist |
3.1.1 Hypothesis 1 — Infrastructure Protection Imperative
The first and most directly evidenced driver is the infrastructure protection imperative, which posits that the rapid development of autonomous underwater systems is primarily a response to the increasing vulnerability of submarine cables, pipelines, and offshore energy systems, assets that are explicitly identified by NATO as critical to both civilian and military functioning.
Official NATO material underscores the necessity of protecting undersea infrastructure, highlighting that cables and pipelines constitute essential components of global communication and energy systems and are increasingly exposed to sabotage and espionage risks NATO Maritime Security Initiatives – March 2026.
3.1.2 Hypothesis 2 — Cost-Imposition Strategy
The second hypothesis interprets GREYSHARK Foxtrot as part of a broader cost-imposition strategy, wherein states seek to impose disproportionate surveillance and defense costs on potential adversaries by deploying relatively low-cost autonomous systems capable of persistent monitoring, thereby forcing adversaries to expend greater resources to evade detection or conduct covert operations.
This aligns with the fundamental asymmetry in maritime security:
- Traditional naval patrols are expensive and limited
- Autonomous systems enable scalable coverage
3.1.3 Hypothesis 3 — Alliance Interoperability and Standardization
The third hypothesis emphasizes the role of NATO interoperability frameworks, particularly through initiatives such as REPMUS and the Rapid Adoption Action Plan (RAAP), which aim to standardize the integration of unmanned systems across allied forces.
NATO has explicitly established innovation ranges and experimentation environments to accelerate the adoption of autonomous technologies, including maritime systems, thereby creating a structural incentive for member states and industry actors to align their platforms with alliance requirements NATO Innovation Range – 2026.
3.1.4 Hypothesis 4 — Civil-Military Fusion and Dual-Use Surveillance
The fourth hypothesis focuses on civil-military fusion, wherein defense systems are increasingly designed to monitor and protect infrastructure that is predominantly owned and operated by civilian entities.
The Dutch Ministry of Defence has publicly documented joint operations with private-sector partners to monitor North Sea infrastructure, emphasizing that such assets are targeted “virtually daily” by hostile activities, thereby necessitating integrated surveillance approaches Dutch Ministry of Defence Maritime Operations – 2025.
3.1.5 Hypothesis 5 — European Strategic Autonomy
The fifth hypothesis situates GREYSHARK within the broader push for European strategic autonomy, particularly in defense technologies where reliance on non-European suppliers—especially the United States—has historically been significant.
The rapid development cycle of GREYSHARK, combined with its European industrial base, suggests an effort to:
- Develop indigenous capabilities
- Reduce dependency on external systems
- Enhance regional technological sovereignty
3.2 Defense-Industrial-Financial Nexus and Procurement Incentives
The development and deployment of systems such as GREYSHARK Foxtrot are embedded within a complex defense-industrial-financial nexus, wherein:
- Defense firms seek to secure contracts and expand market share
- Governments aim to enhance security capabilities
- Financial actors invest in high-growth defense technologies
3.2.1 Procurement Dynamics
The reported acquisition of a first customer order in September 2025, as disclosed by EUROATLAS, indicates the transition from development to early-stage procurement, suggesting that at least one governmental or defense-related entity has committed resources to the system Areas of Application – EUROATLAS – 2025.
3.2.2 Structural Incentives
Key incentives include:
- Increasing defense budgets in Europe
- Demand for autonomous systems
- Need for scalable maritime surveillance
3.3 European Strategic Autonomy vs Alliance Dependency
The tension between European strategic autonomy and NATO alliance dependency is a defining feature of the current defense landscape.
Dual Dynamic
| Autonomy Vector | Dependency Vector |
|---|---|
| Indigenous system development | NATO interoperability requirements |
| European industrial base | US technological leadership |
| Regional security priorities | Alliance-wide coordination |
GREYSHARK embodies this duality:
- Developed by European firms
- Integrated into NATO frameworks
3.4 Cost-Imposition and Deterrence Dynamics
Autonomous systems like GREYSHARK Foxtrot contribute to deterrence by:
- Increasing the probability of detection
- Expanding surveillance coverage
- Raising operational costs for adversaries
Deterrence Mechanism
- Persistent monitoring →
- Increased detection likelihood →
- Reduced adversary freedom of action →
- Elevated operational risk
3.5 Red-Team Counterfactuals and Failure Modes
Table 6 — Red-Team Scenarios
| Scenario | Description | Implication |
|---|---|---|
| Overstated Capability | Performance below advertised levels | Reduced operational value |
| Detectability | Acoustic signature exploited | Vulnerability to countermeasures |
| Logistics Constraint | Hydrogen supply limitations | Deployment restrictions |
| Integration Failure | Interoperability issues | Reduced network effectiveness |
| Adversary Adaptation | Counter-UUV technologies | Diminished advantage |
3.6 Future Conflict Trajectories: Cyber–Kinetic–Subsea Convergence
The future operational environment is likely to be defined by the convergence of:
- Cyber operations (targeting control systems and data networks)
- Kinetic actions (physical sabotage or defense)
- Subsea operations (infrastructure monitoring and interference)
Emerging Pattern
- Autonomous systems collect data
- AI systems analyze anomalies
- Command networks coordinate responses
This creates a multi-domain feedback loop in which information flows across:
- Underwater
- Surface
- Air
- Cyber domains
3.7 Chapter III Synthesis
The GREYSHARK Foxtrot system is best understood as a node within a broader geopolitical and technological transformation, driven by:
- Infrastructure vulnerability
- Cost-imposition strategies
- Alliance integration
- Civil-military fusion
- Strategic autonomy ambitions
Its ultimate impact will depend on:
- Technological maturation
- Integration into operational networks
- Adversary countermeasures
Across all three chapters, the evidence indicates that GREYSHARK Foxtrot is not merely a platform but a manifestation of a systemic shift toward persistent, autonomous, and network-integrated maritime security architectures, particularly within the Baltic–North Sea region, where geopolitical tension, infrastructure vulnerability, and technological innovation converge to reshape the future of naval operations.
GREYSHARK Foxtrot – Maritime autonomous underwater system context, Germany
| Metric | Value / Status |
|---|---|
| System type | High-endurance, fuel-cell-powered autonomous underwater platform; autonomous underwater vehicle (AUV); persistent autonomous undersea surveillance platform |
| Program status | Transitioning from advanced prototype to early operational capability |
| Design philosophy | Persistent maritime surveillance; seabed infrastructure protection; integration into distributed multi-domain sensing networks |
| Primary missions | Monitoring underwater infrastructure; long-range intelligence, surveillance, and reconnaissance (ISR); mine countermeasure-relevant missions; territorial water patrol; covert reconnaissance missions; swarm-enabled distributed sensing architectures |
| Operational doctrine | Multi-layered, functionally adaptive mission architecture; programmable sensor platform capable of executing sequential or simultaneous mission profiles, depending on environmental conditions, command inputs, and onboard decision-making algorithms |
| Propulsion type | Fuel-cell electric (hydrogen-based) |
| Length | ~7.99 meters |
| Weight | ~4.5 tonnes; ~4.5 tons |
| Maximum speed | >12 knots |
| Optimal cruise speed | 10 knots |
| Range at 4 knots | ~10,700 nautical miles |
| Range at 10 knots | ~1,100+ nautical miles |
| Endurance | Up to 16 weeks; 112 days of uninterrupted deployment |
| Current depth rating | ~650 meters |
| Target depth rating | ~4000 meters |
| Communications architecture | Encrypted underwater acoustic communication systems; satellite communication links (via surfaced antenna systems); tactical radio communication |
| Autonomy and software stack | Automatic target recognition (ATR) algorithms; dynamic mission adaptation capability; combat cloud integration interfaces |
| Command paradigm | Autonomous execution during communication denial; intermittent data exfiltration via acoustic or satellite links; integration into broader multi-domain networks |
| ISR functions | Long-duration, low-signature monitoring of maritime zones; monitoring vessel traffic patterns near critical infrastructure; detecting anomalous seabed disturbances; collecting acoustic and environmental signatures for baseline mapping |
| Seabed infrastructure protection functions | Persistent patrol of cable routes; periodic inspection of pipeline segments; detection of unauthorized interference or tampering |
| Mine warfare adjacency functions | Detection and classification of seabed objects; mapping of mine-like signatures; route verification for safe navigation |
| Covert patrol functions | Monitoring harbor approaches; observing naval base activity; tracking vessel movements in restricted zones |
| Signature profile | Low observable; not undetectable |
| Noise and detectability considerations | Fuel-cell systems require recirculation pumps and associated thermal management subsystems; these introduce mechanical noise signatures that may be detectable by passive sonar systems |
| Noise sources | Pump operation (continuous or intermittent); flow turbulence within fuel system; control surface actuation; propulsion system harmonics |
| Detectability variables | Speed; mission phase; environmental conditions (thermal layers, salinity gradients) |
| Stealth comparison | Likely low observable relative to surface vessels or active sonar systems; not equivalent to nuclear or advanced diesel-electric submarines in stealth |
| Engineering significance of fuel-cell system | Higher energy density vs lithium-ion batteries; reduced need for frequent surfacing or recovery; sustained long-duration missions without logistical interruption |
| Operational consequences of endurance | Persistent surveillance without logistical interruption; reduced reliance on support vessels; expanded operational reach into remote or contested maritime zones |
| Strategic significance | Fills the gap between fixed seabed sensors (static, predictable) and manned submarines (scarce, expensive) |
| Relevant operational domains by depth | 0–200 m: Coastal and port environments • 200–1000 m: Continental shelf (pipelines, offshore energy) • 1000–4000 m: Deep-sea cables and transoceanic routes |
| Strategic access enabled at 4000 meters | Transcontinental internet cables; deepwater energy infrastructure; strategic seabed routes |
| Technology readiness level estimate | TRL 4–6 range; TRL 4: Component validation — achieved • TRL 5: Subsystem validation — achieved • TRL 6: Relevant environment testing — partially achieved |
| Confirmed testing and validation status | Land-based subsystem testing: completed • Controlled environment validation: completed • Open-water trials: documented (January 2025) |
| Publicly unconfirmed items | No primary evidence confirms full operational deployment; maximum depth validation; full endurance mission completion |
| Role in wider ecosystem | Node within a distributed undersea security ecosystem; effectiveness depends on integration with broader networks of sensors, platforms, and decision-making systems |
| Chapter III strategic interpretation | Node within a broader geopolitical and technological transformation |
| Dependency factors for impact | Technological maturation; integration into operational networks; adversary countermeasures |
GREYSHARK Bravo – Maritime autonomous underwater system context, Germany
| Metric | Value / Status |
|---|---|
| System type | Baseline electric variant |
| Propulsion type | Battery-electric |
| Endurance | Limited (battery-dependent) |
| Mission profile | Tactical / short-range |
| Complexity | Lower |
| Signature profile | Lower mechanical noise |
| Deployment concept | Rapid deployment |
| Comparative relationship to Foxtrot | Lower endurance, lower complexity; optimized for shorter missions and tactical deployments |
GREYSHARK Program – Germany
| Metric | Value / Status |
|---|---|
| Program nature | Modular architecture supporting multiple propulsion and mission configurations |
| Main configurations identified | Bravo; Foxtrot |
| Formal collaboration start | February 2023 |
| Initial validation testing | May 2023 |
| Initial validation testing location | WTD71 Eckernförde |
| Public unveiling | March 2024 |
| Controlled channel testing | November 2024 |
| Controlled channel testing location | HSVA Hamburg |
| First documented open-water trials | January 2025 |
| Open-water trial location | Rostock maritime area |
| Participation in multinational experimentation | May 2025 — NATO REPMUS experimentation exercise |
| Procurement milestone | September 2025 — First customer order secured |
| First customer order detail | Undisclosed client; at least one governmental or defense-related entity has committed resources to the system |
| Development trajectory interpretation | Unusually compressed development trajectory; tightly compressed sequence of milestones; rapid prototyping cycles consistent with defense innovation acceleration models; early alignment with NATO experimentation frameworks; intent to transition from demonstrator to deployable capability within <24 months |
| TRL progression interpretation | Progressing from concept validation (TRL 2–3) through component and subsystem validation (TRL 4–5) and into relevant-environment testing (TRL 6) |
| January 2025 milestone significance | First publicly documented transition from controlled testing environments to operationally representative maritime conditions |
| REPMUS significance | Indicates exposure to multi-actor operational environments involving allied naval forces, unmanned surface vehicles (USVs), and aerial ISR assets |
| Public disclosure scope | Specific performance outcomes of REPMUS participation are not publicly disclosed in primary sources |
| Industrial positioning | Not conceived as a single-purpose platform but as a multi-mission autonomous system |
| Strategic characterization | Best understood not as a fully mature deployed weapon system but as an emerging high-endurance autonomous undersea node designed to enable persistent maritime domain awareness within NATO-aligned seabed security architectures |
EUROATLAS – Germany
| Metric | Value / Status |
|---|---|
| Entity type | German unmanned systems manufacturer |
| Role in GREYSHARK | Formal collaboration partner; provides legacy expertise in naval electronics, mine countermeasure systems, and autonomous platform control |
| Partnership with EvoLogics | Publicly documented as initiated in February 2023 |
| Public mission framing for GREYSHARK | Monitoring underwater infrastructure; conducting long-range intelligence, surveillance, and reconnaissance (ISR); supporting mine countermeasure operations; performing territorial water patrol; executing covert reconnaissance missions; integrating into swarm-enabled distributed sensing architectures |
| Product and brochure positioning | Critical underwater infrastructure protection; long-range ISR; mine-related missions; multi-domain maritime sensing |
| Market positioning implication | Platform is being positioned not merely as a tactical asset but as a strategic enabler within emerging maritime domain awareness ecosystems |
| Broader industrial trend reflected | Small-to-mid tier specialized technology firms increasingly integrated into modular capability development chains, bypassing traditional monolithic prime-contractor dominance, enabling accelerated iteration cycles and reduced time-to-fielding, particularly in unmanned maritime systems |
| Documented official disclosures used in prior chapters | Areas of Application page used to confirm architecture, timeline, mission set, communications, autonomy stack, and Foxtrot specifications |
| Historical relevance | Historical involvement in mine countermeasure systems |
EvoLogics – Germany
| Metric | Value / Status |
|---|---|
| Entity type | German underwater communication systems company |
| Role in GREYSHARK | Formal collaboration partner |
| Specialization contributed to GREYSHARK | Acoustic communication modems; subsea positioning systems; bio-inspired sonar technologies |
| Partnership significance | Integrates underwater communications science with high-end naval systems engineering and autonomous control architectures |
| Core operational problem addressed through contribution | Extreme degradation of electromagnetic communication channels in seawater and the consequent necessity for robust, low-bandwidth, high-reliability acoustic data exchange and semi-autonomous decision-making loops |
WTD71 Eckernförde – Eckernförde, Germany
| Metric | Value / Status |
|---|---|
| Entity type | German naval test facility |
| Relationship to GREYSHARK | Initial validation testing conducted here |
| Date of GREYSHARK activity | May 2023 |
| Testing significance | Early validation milestone within program development trajectory |
HSVA Hamburg – Hamburg, Germany
| Metric | Value / Status |
|---|---|
| Entity type | Controlled channel testing facility |
| Relationship to GREYSHARK | Controlled channel testing for hydrodynamic validation |
| Date of GREYSHARK activity | November 2024 |
| Testing significance | Controlled environment milestone preceding open-water trials |
Rostock Maritime Area / Rostock Naval Base – Rostock / Mecklenburg Bight context, Germany
| Metric | Value / Status |
|---|---|
| Entity type | Maritime test and experimentation location |
| GREYSHARK relevance | First documented open-water trials conducted near Rostock |
| Date of GREYSHARK open-water trials | January 2025 |
| SeaSEC relevance | Challenge Weeks 2026 conducted in the Mecklenburg Bight and Rostock naval base |
| Challenge Week focus areas | Harbor protection; offshore platform security; cable monitoring |
| Operational significance | Relevant-environment testing and multinational experimentation context |
NATO REPMUS – Multinational maritime experimentation context, NATO
| Metric | Value / Status |
|---|---|
| Entity type | Robotic Experimentation and Prototyping using Maritime Uncrewed Systems exercise |
| GREYSHARK participation | May 2025 |
| Function | Multinational experimentation platform designed to evaluate interoperability, autonomy behaviors, and system integration within complex maritime scenarios |
| Significance for GREYSHARK | Indicates system has been exposed to multi-actor operational environments involving allied naval forces, unmanned surface vehicles (USVs), and aerial ISR assets |
| Public result disclosure | Specific performance outcomes are not publicly disclosed in primary sources |
SeaSEC – Baltic Sea and North Sea shallow-water security framework, Multinational Europe
| Metric | Value / Status |
|---|---|
| Full name | Seabed Security Experimentation Centre |
| Entity type | Multinational experimentation and capability development framework |
| Founding date | December 2023 |
| Founders | Multiple European defense ministries; six nations with shallow-water coastlines along the Baltic Sea and North Sea |
| Mission | Accelerate the development and operationalization of capabilities aimed at protecting seabed infrastructure in shallow and coastal waters |
| Geographic focus | Baltic Sea and North Sea regions |
| Role in operationalization | Provides a platform for joint experimentation; technology validation; operational concept development |
| Challenge Weeks 2026 timing | 13–24 April 2026 |
| Challenge Weeks 2026 locations | Mecklenburg Bight; Rostock naval base |
| Challenge Weeks 2026 focus | Harbor protection; offshore platform security; cable monitoring |
| Relation to GREYSHARK mission set | Directly aligned with persistent patrol of cable routes, periodic inspection of pipeline segments, and detection of unauthorized interference or tampering |
| Structural significance | Central to the operationalization of seabed security capabilities |
NATO Rapid Adoption Action Plan / Innovation Ranges – NATO alliance framework, Europe
| Metric | Value / Status |
|---|---|
| Entity type | Alliance innovation and experimentation framework |
| Purpose | Establish innovation ranges and testing environments specifically designed for autonomous maritime technologies, including maritime systems |
| Maritime relevance | Supports development of autonomous systems and alliance-level experimentation |
| Specific range mentioned | Shallow Waters testing range in the Netherlands |
| Structural incentive created | Encourages member states and industry actors to align their platforms with alliance requirements |
| Relationship to GREYSHARK | Supports integration pathways and standardization context for autonomous maritime systems |
NATO CMRE / Mainsail – NATO maritime AI research context, NATO
| Metric | Value / Status |
|---|---|
| Entity type | NATO Centre for Maritime Research and Experimentation (CMRE) and associated AI capability |
| AI tool named | Mainsail |
| Function of AI tool | Designed to identify anomalous vessel behavior and potential threats to undersea infrastructure by analyzing large datasets derived from multiple sensor inputs |
| Relevance to GREYSHARK | GREYSHARK contributes by collecting high-resolution environmental and acoustic data; performing onboard preprocessing and classification; transmitting actionable intelligence to command networks |
| System-level effect | Creates a feedback loop in which data is collected → analyzed → disseminated → acted upon |
Dutch Ministry of Defence North Sea Surveillance Operations – North Sea, Netherlands
| Metric | Value / Status |
|---|---|
| Entity type | National defense operational framework |
| Public statement on threat environment | Undersea infrastructure is targeted “virtually daily” by sabotage and espionage activities |
| Publicly documented cooperation | Joint operations with private-sector partners such as Fugro to monitor North Sea infrastructure |
| Activities documented | Collected data and imagery of North Sea infrastructure |
| Strategic implication | Necessitates integrated surveillance approaches |
| Civil-military fusion outcomes | Shared situational awareness; combined data repositories; joint response mechanisms |
Fugro – North Sea infrastructure monitoring context, Netherlands
| Metric | Value / Status |
|---|---|
| Entity type | Private-sector partner |
| Relationship to Dutch Ministry of Defence | Participated in joint operations to monitor North Sea infrastructure |
| Operational contribution | Collected data and imagery of North Sea infrastructure |
| Relevance in chapter analysis | Example of civil-military fusion and dual-use surveillance |
Baltic–North Sea Undersea Security Grid – Baltic Sea / North Sea, Europe
| Metric | Value / Status |
|---|---|
| Entity type | Conceptual federated security architecture |
| Definition | Emerging distributed network of autonomous underwater vehicles (AUVs); unmanned surface vehicles (USVs); fixed seabed sensors; satellite and aerial ISR assets; AI-driven data analysis platforms |
| Nature | Not a single unified system but a federated architecture composed of national and multinational capabilities, increasingly coordinated through NATO and regional initiatives |
| Primary drivers | Increased vulnerability of subsea infrastructure; rising geopolitical tensions in the Baltic region; dependence on undersea data and energy transmission |
| Strategic significance for GREYSHARK | Operational relevance is best understood within this context; GREYSHARK is a node within this distributed undersea security ecosystem |
| Expected effects | Persistent autonomous sensing; AI-driven anomaly detection; civil-military integration; multinational coordination |
Critical Undersea Infrastructure Nodes – Maritime infrastructure summary, Europe / Global relevance
| Metric | Value / Status |
|---|---|
| Entity type | Strategic infrastructure category group |
| Submarine cables | Global internet backbone |
| Pipelines | Energy supply chains |
| Offshore platforms | Oil, gas, renewable energy |
| Ports and harbors | Trade and military logistics |
| Operational relevance | High-value targets for sabotage; critical dependencies for national economies; key points for ISR and surveillance |
European Defense-Industrial-Financial Nexus – Europe
| Metric | Value / Status |
|---|---|
| Entity type | Structural network / analytical group |
| Constituent actors | Defense firms seek to secure contracts and expand market share; governments aim to enhance security capabilities; financial actors invest in high-growth defense technologies |
| Procurement evidence cited | First customer order in September 2025, as disclosed by EUROATLAS |
| Procurement interpretation | Indicates transition from development to early-stage procurement |
| Likely buyer profile | At least one governmental or defense-related entity has committed resources to the system |
| Structural incentives | Increasing defense budgets in Europe; demand for autonomous systems; need for scalable maritime surveillance |
European Strategic Autonomy vs Alliance Dependency – Europe / NATO context
| Metric | Value / Status |
|---|---|
| Entity type | Analytical dual-dynamic framework |
| Autonomy vector | Indigenous system development; European industrial base; regional security priorities |
| Dependency vector | NATO interoperability requirements; US technological leadership; alliance-wide coordination |
| GREYSHARK relevance | Developed by European firms; integrated into NATO frameworks |
| Core tension | Defining feature of the current defense landscape |
Five Competing Geopolitical Driver Models (ACH Framework) – Analytical framework context, Europe / NATO maritime theater
| Metric | Value / Status |
|---|---|
| Framework type | Analysis of Competing Hypotheses (ACH) |
| Purpose | Avoid monocausal explanations and instead evaluate multiple structurally distinct geopolitical drivers that could independently account for the observed convergence of autonomous maritime systems development, seabed security prioritization, and alliance-level experimentation |
| Theater referenced | Baltic–North Sea operational theatre |
| H1 | Infrastructure Protection Imperative |
| H1 core mechanism | Reaction to vulnerability of cables/pipelines |
| H1 primary evidence alignment | NATO & national focus on subsea security |
| H1 key weakness | Reactive rather than strategic |
| H2 | Cost-Imposition Strategy |
| H2 core mechanism | Reduce cost asymmetry vs adversaries |
| H2 primary evidence alignment | Autonomous systems reduce deployment costs |
| H2 key weakness | Requires scalable deployment |
| H3 | Alliance Interoperability |
| H3 core mechanism | Standardization across NATO systems |
| H3 primary evidence alignment | REPMUS, NATO innovation ranges |
| H3 key weakness | Integration complexity |
| H4 | Civil-Military Fusion |
| H4 core mechanism | Dual-use infrastructure monitoring |
| H4 primary evidence alignment | Dutch MoD + industry cooperation |
| H4 key weakness | Governance/legal friction |
| H5 | European Strategic Autonomy |
| H5 core mechanism | Reduce dependence on US systems |
| H5 primary evidence alignment | EU industrial acceleration |
| H5 key weakness | Capability gaps persist |
Cost-Imposition and Deterrence Dynamics – Maritime security strategy context, Europe / NATO
| Metric | Value / Status |
|---|---|
| Entity type | Analytical mechanism / strategic effect |
| Contribution of autonomous systems | Increase the probability of detection; expand surveillance coverage; raise operational costs for adversaries |
| Deterrence sequence | 1. Persistent monitoring → 2. Increased detection likelihood → 3. Reduced adversary freedom of action → 4. Elevated operational risk |
| Maritime asymmetry described | Traditional naval patrols are expensive and limited; autonomous systems enable scalable coverage |
Red-Team Counterfactuals and Failure Modes – Analytical scenario set, GREYSHARK / undersea security ecosystem
| Metric | Value / Status |
|---|---|
| Scenario 1 | Overstated Capability |
| Scenario 1 description | Performance below advertised levels |
| Scenario 1 implication | Reduced operational value |
| Scenario 2 | Detectability |
| Scenario 2 description | Acoustic signature exploited |
| Scenario 2 implication | Vulnerability to countermeasures |
| Scenario 3 | Logistics Constraint |
| Scenario 3 description | Hydrogen supply limitations |
| Scenario 3 implication | Deployment restrictions |
| Scenario 4 | Integration Failure |
| Scenario 4 description | Interoperability issues |
| Scenario 4 implication | Reduced network effectiveness |
| Scenario 5 | Adversary Adaptation |
| Scenario 5 description | Counter-UUV technologies |
| Scenario 5 implication | Diminished advantage |
Future Conflict Trajectories: Cyber–Kinetic–Subsea Convergence – Multi-domain conflict context, Europe / NATO maritime theater
| Metric | Value / Status |
|---|---|
| Entity type | Forward-looking conflict trajectory framework |
| Converging domains | Cyber operations (targeting control systems and data networks); kinetic actions (physical sabotage or defense); subsea operations (infrastructure monitoring and interference) |
| Emerging pattern | Autonomous systems collect data; AI systems analyze anomalies; command networks coordinate responses |
| Domain-spanning information flow | Underwater; surface; air; cyber domains |
| System-level characterization | Multi-domain feedback loop |
National / Regional / Sector-Wide Summary – GREYSHARK, seabed security, and NATO-integrated maritime autonomy, Europe
| Metric | Value / Status |
|---|---|
| Overall system conclusion | GREYSHARK Foxtrot is not merely a platform but a manifestation of a systemic shift toward persistent, autonomous, and network-integrated maritime security architectures |
| Regional focus | Particularly within the Baltic–North Sea region |
| Structural conditions of that region | Geopolitical tension; infrastructure vulnerability; technological innovation converge to reshape the future of naval operations |
| Chapter I conclusion | GREYSHARK Foxtrot represents a high-endurance, fuel-cell-powered autonomous underwater platform transitioning from advanced prototype to early operational capability, with unresolved uncertainties regarding acoustic detectability, full-depth validation, and real-world endurance performance |
| Chapter II conclusion | GREYSHARK Foxtrot operates within an emerging multi-domain maritime security architecture characterized by persistent autonomous sensing, AI-driven anomaly detection, civil-military integration, and multinational coordination |
| Chapter III conclusion | GREYSHARK Foxtrot is best understood as a node within a broader geopolitical and technological transformation driven by infrastructure vulnerability, cost-imposition strategies, alliance integration, civil-military fusion, and strategic autonomy ambitions |
| Ultimate impact variables | Technological maturation; integration into operational networks; adversary countermeasures |



{kind=link}